CVPR2020 值得关注的TOP级别对象检测模型
点击上方“计算机视觉life”,选择“星标”
快速获得最新干货
本文转自微信公众号:OpenCV学堂
对象检测是计算机视觉的核心任务之一,自从深度学习加持了对象检测任务之后,对象检测领域的发展就一日千里,每年都不断有新的突破,今天小编就给大家整理一下CVPR2020最值得关注几篇对象检测方向的论文。
01
基于层次图网络3D点云对象检测
论文下载地址:
https://openaccess.thecvf.com/content_CVPR_2020/papers/Chen_A_Hierarchical_Graph_Network_for_3D_Object_Detection_on_Point_CVPR_2020_paper.pdf论文提出了一种新模型架构HGNet,主要分为下面三个部分组成:
- 基于图卷积的U形网络- 一个新的生成者网络- 一个新推理模块
整个结构如下:
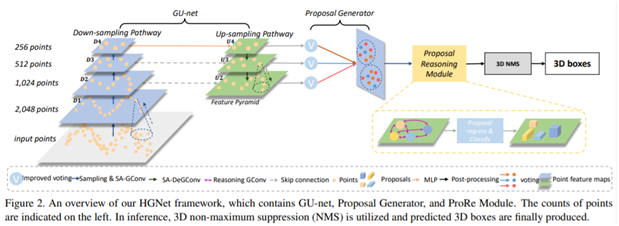
作者提出了形状注意力图卷积来捕捉局部形状特征损失,通过建立相对位置模型来描述对象形状。
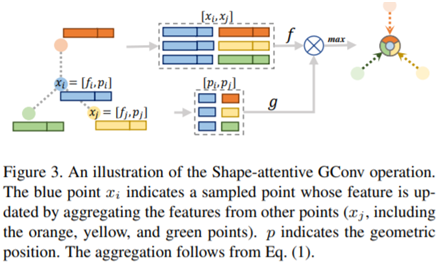
在U形网络中使用该结构提取多层特征,映射到特征空间,最终基于推理模块实现检测框架预测。
02
混合三维像素体的激光雷达三维目标检测
论文下载地址
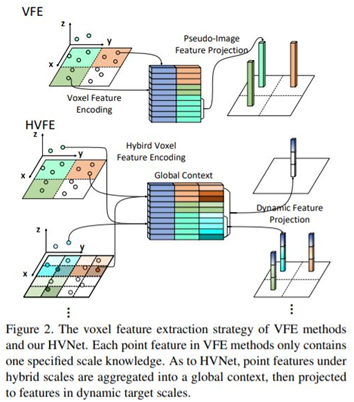
https://arxiv.org/pdf/2003.00186v2.pdf作者在论文中提出了一种新的模型Hybrid Voxel Network (HVNet),在自动驾驶领域基于三维点云实现了一阶段对象检测网络。
论文中提到的三维像素特征编码(VFE)方法包含三个步骤
1. 将点云映射到2D 网格2. 计算每个点的特征,通过PointNet实现特征编码3. 聚合点特征位Voxel级别的特征并投影到原网格
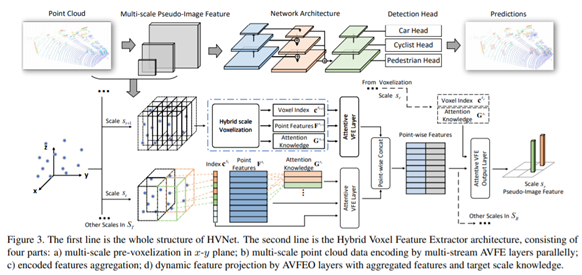
完整的HVNet网络结构如下:
03
基于图神经网络的3D点云对象检测(Point-GNN)
论文下载地址:
https://openaccess.thecvf.com/content_CVPR_2020/supplemental/Shi_Point-GNN_Graph_Neural_CVPR_2020_supplemental.pdf作者提出了一种新的网络模型Point-GNN,实现了对激光雷达数据点云的3D对象检测,网络预测对象类别与形状,作为一阶段网络,实现了自动回归计算机制检测多个对象。网络结构如下图所示:
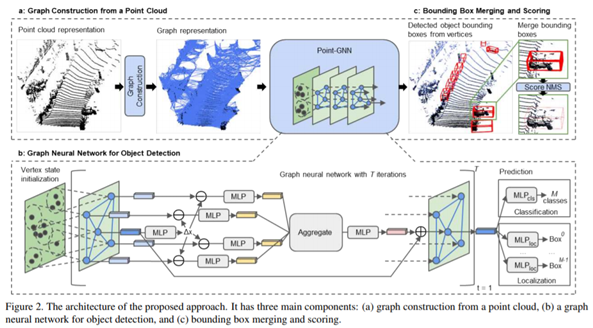
主要包含三个部分:
图构建
图神经网络
预测框架合并与分值
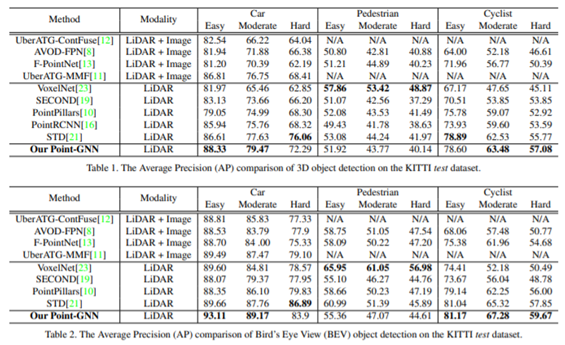
该网络在KITTI 数据集的表现如下:
04
伪装目标检测(COD)
论文下载地址:
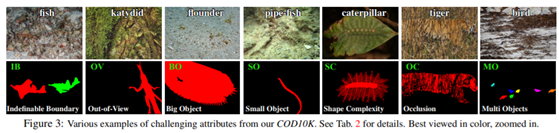
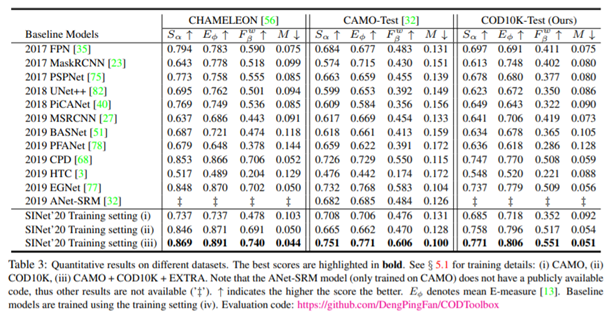
https://openaccess.thecvf.com/content_CVPR_2020/papers/Fan_Camouflaged_Object_Detection_CVPR_2020_paper.pdf伪装或者周围形似的目标检测一直是目标检测领域最有挑战性的问题,作者在论文中提出了一个新的数据集COD10K,包含一万张自然场景下的伪装对象,总计78个对象类别,图像通过标签、box框、实例分割、Matting级别的标注。

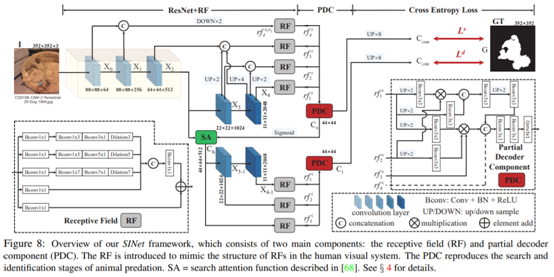
基于这些数据集,作者开发了一个新的伪装对象检测框架SINet(Search Identification Network),网络架构如下:
基于该网络的测试对比结果如下:
05
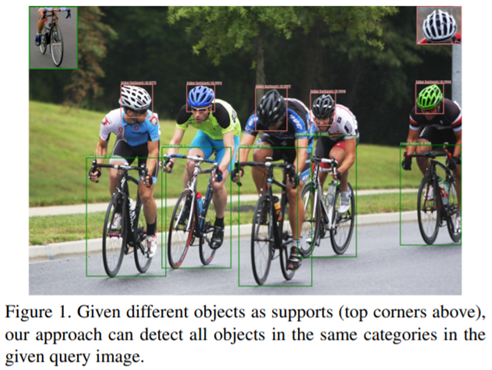
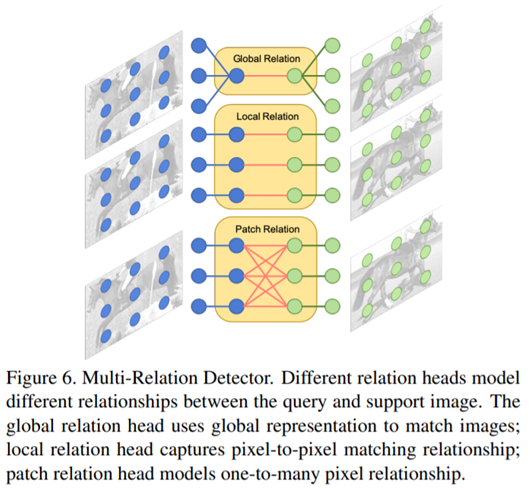
基于注意力的RPN和多关系检测器的少样本目标检测
论文下载地址如下:
https://arxiv.org/pdf/1908.01998v4.pdf该论文主要是引入了注意力机制的RPN、多关系检测器、对比训练策略。通过相似查询与对比实现对新对象的鉴定,通过作者还贡献了一个包含1000个类别的高质量标注的数据集。
新的网络架构是基于多分支共享权重网络,一个分支是查询,另外一个分支是支持,查询分支的共享权重网络是基于Faster RCNN结构。网络结构图示如下:
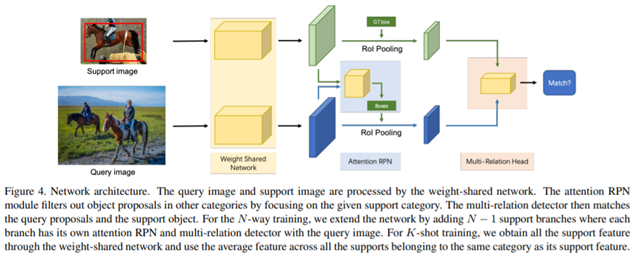
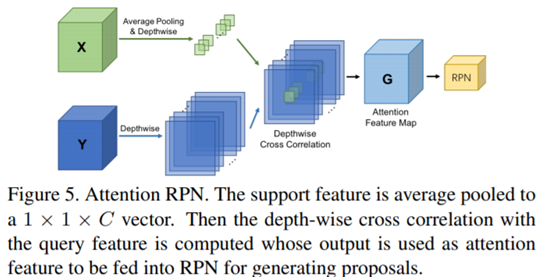
作者在网络中还使用了注意力机制的RPN网络与多关系检测器模块来提升支持与查询Boxes的精度。
实验测试结果

06
D2Det
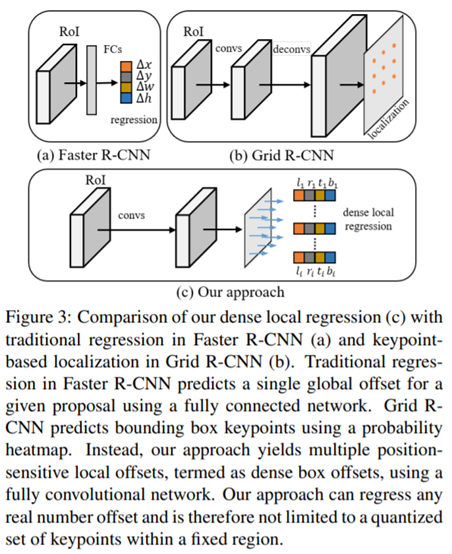
高质量对象检测与实例分割论(Towards High-Quality Object Detection and Instance Segmentation)文下载地址:
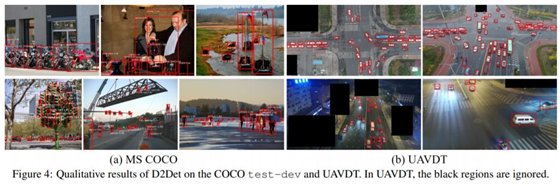
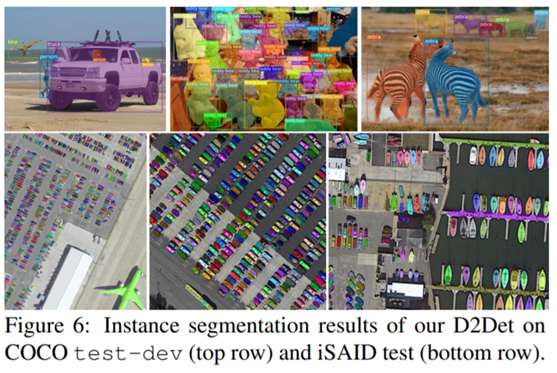
https://openaccess.thecvf.com/content_CVPR_2020/papers/Cao_D2Det_Towards_High_Quality_Object_Detection_and_Instance_Segmentation_CVPR_2020_paper.pdf作者提出了一种新两阶段对象检测网络模型D2Det,实现高精度定位与准确分类,采用密集局部回归预测多个密集Boxes从而达到新的Box定位精度。作者提出了一种可判别的ROI池化策略提升了分类准确率。方法基于标准的Faster RCNN网络改进,其中的框迁移回归被替换为新提出的密集局部回归网络。整个网络的模型结构如下:
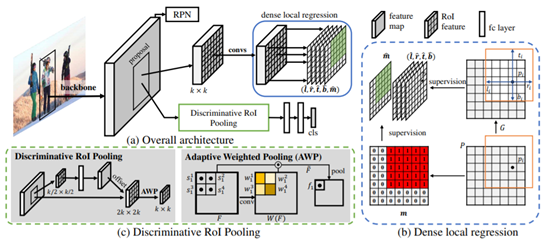
在该两阶段的网络模型中,RPN部分是第一阶段,第二阶段它有两个分支输出分别是分类与位置回归。其中分类基于可区别的池化实现,回归基于局部回归。
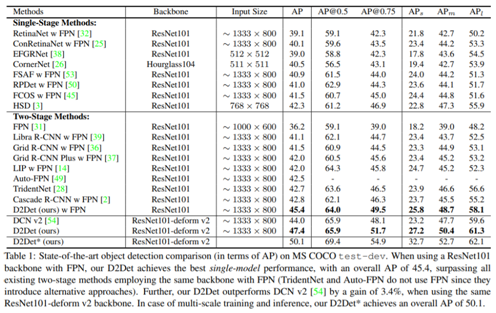
基于MS COCO数据集的实验对比结果如下:
君子藏器于身,待时而动
交流群
欢迎加入公众号读者群一起和同行交流,目前有SLAM、三维视觉、传感器、自动驾驶、计算摄影、检测、分割、识别、医学影像、GAN、算法竞赛等微信群(以后会逐渐细分),请扫描下面微信号加群,备注:”昵称+学校/公司+研究方向“,例如:”张三 + 上海交大 + 视觉SLAM“。请按照格式备注,否则不予通过。添加成功后会根据研究方向邀请进入相关微信群。请勿在群内发送广告,否则会请出群,谢谢理解~
投稿、合作也欢迎联系:simiter@126.com

扫描关注视频号,看最新技术落地及开源方案视频秀 ↓


