Cascade R-CNN升级!目标检测制霸COCO,实例分割超越Mask R-CNN
加入极市专业CV交流群,与6000+来自腾讯,华为,百度,北大,清华,中科院等名企名校视觉开发者互动交流!更有机会与李开复老师等大牛群内互动!
同时提供每月大咖直播分享、真实项目需求对接、干货资讯汇总,行业技术交流。点击文末“阅读原文”立刻申请入群~
本文授权转自公众号我爱计算机视觉
近日,arxiv上新出一篇论文《Cascade R-CNN: High Quality Object Detection and Instance Segmentation》,目标检测算法Cascade R-CNN 原作者对其进行扩展应用于实例分割。

两位作者均来自加州大学圣地亚哥分校,这可能是一篇投向TPAMI的论文。
在目标检测的实验中,借助于骨干网ResNeXt-152 的加持,在COCO数据集上AP达到50.9,超越之前的SOTA TridentNet算法的48.4,在实例分割实验中精度也显著高于Mask R-CNN。
Cascade R-CNN 是什么?
Cascade R-CNN 是2017年末出的目标检测算法,它的核心思想是:
使用不同的IOU阈值,训练多个级联的检测器。
它可以用于级联已有的检测器,取得更加精确的目标检测。
描述Cascade R-CNN算法的论文被CVPR 2018录用,该文一出,曾经相当长时间位于COCO检测数据集精度榜首(后被图森的TridentNet超越,这次又超了回来。。。)。
谷歌学术显示:

原论文已有111次引用。
作者开源了代码,该算法曾经被COCO 2018 instance segmentation challenge , OpenImage 2018 challenge , Wider Challenge 2018 的获胜团队使用(作者文中声称)。
Cascade R-CNN 网络结构
网络结构如下图b,

公式表示就是这样的:
=f_T\cdot f_{T-1}\cdot f_{T-2}\cdot \cdot \cdot \cdot f_1(x,b)")
上图中b和c很像,iterative bbox at inference 是在推断时候对回归框进行后处理,即生成了之后在多次处理,而Cascade R-CNN 在训练的时候就进行重新采样,不同的stage的输入数据分布已经是不同的了。
Cascade Mask R-CNN 网络结构
受Mask R-CNN发,作者将Cascade R-CNN推广到实例分割很简单,作者提供了三种策略,分别对应下图中b、c、d中将分割头S放在不同的位置。

实验结果
作者在通用目标检测、实例分割数据集COCO上进行了实验,换上骨干网ResNeXt-152的Cascade R-CNN 又刷出了新高度!AP 达到50.9。如下图:

使用不同的检测器和骨干网,级联后都能获得大幅度的精度提升,如下图:
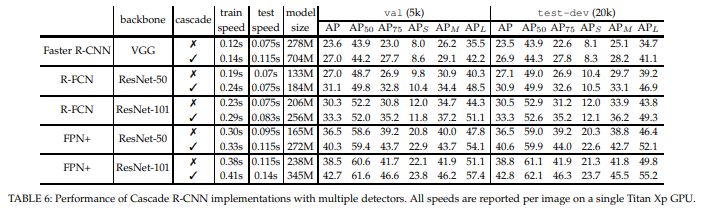
同时可见,级联后推断速度有少许变慢,但在可接受的范围内。
下图是将Cascade Mask R-CNN与基线版本比较的结果,在实例分割任务中,也取得了明显的精度提升。

在PASCAL VOC 2007 数据集上同样表现出,使用级联后均获得精度提升。

作者又在一些特殊目标类、不同数据集上做了实验。
下图为在KITTI车辆类的检测结果:

在CityPersons验证集分割的结果,和在WIderFace数据集上人脸检测结果:

均表明该算法能一致性的提高精度。
论文地址:
https://arxiv.org/abs/1906.09756v1
代码地址:
https://github.com/zhaoweicai/cascade-rcnn(Caffe版)
代码地址:
https://github.com/zhaoweicai/Detectron-Cascade-RCNN(Detectron版)
*延伸阅读
点击左下角“阅读原文”,即可申请加入极市目标跟踪、目标检测、工业检测、人脸方向、视觉竞赛等技术交流群,更有每月大咖直播分享、真实项目需求对接、干货资讯汇总,行业技术交流,一起来让思想之光照的更远吧~

觉得有用麻烦给个在看啦~




