【泡泡一分钟】PoseMap: 终生、多环境的3D激光雷达定位
每天一分钟,带你读遍机器人顶级会议文章
标题:PoseMap: Lifelong, Multi-Environment 3D LiDAR Localization
作者:Philipp Egger, Paulo V K Borges, Gavin Catt, Andreas Pfrunder, Roland Siegwart, Renaud Dube
来源:2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)
编译:张鲁
审核:颜青松,陈世浪
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权

摘要

长期可靠的定位是动态环境中机器人系统的关键技术点。本文中,我们提出了一种使用3D激光雷达进行长时间定位的新方法,名为PoseMap。我们从测距信息中提取出显著的特征信息,然后将信息与观测位姿进行捆绑关联。传感器的轨迹可通过一个滑动窗口的方法进行估计,该方法将当前特征与旧特征进行匹配并最小化他们的距离。在地图表示方面,我们通过选择最近的局部地图进行匹配来辅助选择一组合适的旧特征。与可见性分析类似,这个过程为定位算法提供了合适的特征,但仅消耗了较少的计算资源。PoseMap还允许在任意时刻通过替换以及新增局部地图的方式来对地图进行更新和扩展。
我们使用了两个平台来对我们的方法进行了评估,两个平台均装配了3D激光雷达以及IMU,评估展示了算法对变化的环境诸如移动车辆以及植被变化具有鲁棒性,定位帧率达到了8Hz。
我们在一辆自动驾驶汽车上部署了PoseMap,并且在工业和非结构化的越野环境中开展了为期18个月的自动驾驶测试,在覆盖了100km的测试中没有出现一次定位失败。

图1 测试地点为Queensland Centre of Advanced Technologies (QCAT),测试场地在图中使用颜色进行标注。红色:建筑物;蓝色:停车场;绿色:密集的树林和灌木;紫色:具有开阔草地以及稀少数目的越野坡地。

图2 在QCAT进行自动驾驶测试的轨迹叠加在google地图上的图像。整个路线通过6个路点进行定义,总长度为1.6km。

图3 在同一条路线上相隔约4个月拍摄的照片。上图中的草约有1.5米高,下图则是拍摄于刚割草后。在发生这些变化后定位和自主导航仍可以正常工作。
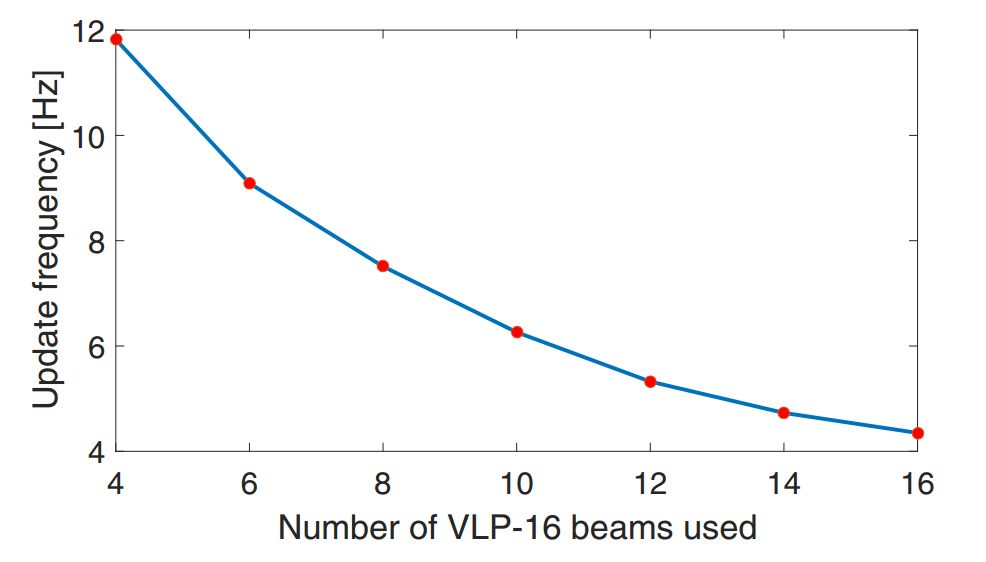
图4 在同一数据集上使用不同的激光线数进行计算的平均更新率。计算平台使用安装了Intel Core i7-4910MQ处理器的 Dell Precision M4800。

Abstract
Reliable long-term localization is key for robotic systems in dynamic environments. In this paper, we propose a novel approach for long-term localization using 3D LiDARs, coined PoseMap. In essence, we extract distinctive features from range measurements and bundle these into local views along with observation poses. The sensor’s trajectory is then estimated in a sliding window fashion by matching current and old features and minimizing the distances in-between. The map representation facilitates finding a suitable set of old features, by selecting the closest local map(s) for matching. Similarly to a visibility analysis, this procedure provides a suitable set of features for localization but at a fraction of the computational cost. PoseMap also allows for updates and extensions of the map at any time by replacing and adding local maps when necessary. We evaluate our approach using two platforms both equipped with a 3D LiDAR and an IMU, demonstrating localization at 8 Hz and robustness to changes in the environment such as moving vehicles and changing vegetation. PoseMap was implemented on an autonomous vehicle allowing it to drive autonomously over a period of 18 months through a mix of industrial and unstructured off-road environments, covering more than 100 kms without a single localization failure.
如果你对本文感兴趣,想要下载完整文章进行阅读,可以关注【泡泡机器人SLAM】公众号(paopaorobot_slam)。
欢迎来到泡泡论坛,这里有大牛为你解答关于SLAM的任何疑惑。
有想问的问题,或者想刷帖回答问题,泡泡论坛欢迎你!
泡泡网站:www.paopaorobot.org
泡泡论坛:http://paopaorobot.org/forums/


泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com





