【泡泡机器人公开课】第九十三课:Online quadrotor trajectory generation-高飞
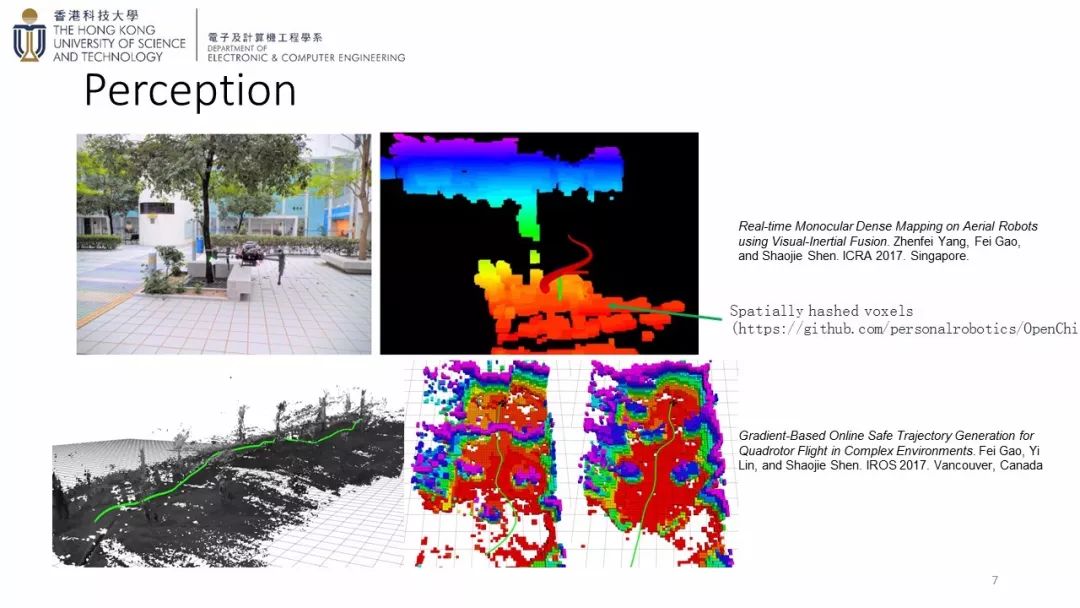
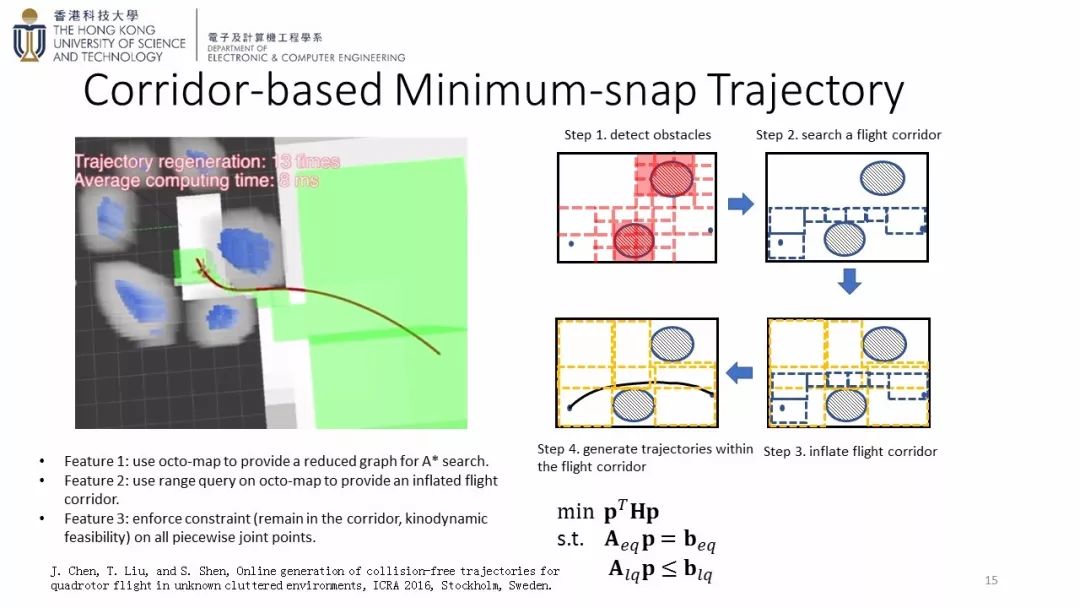
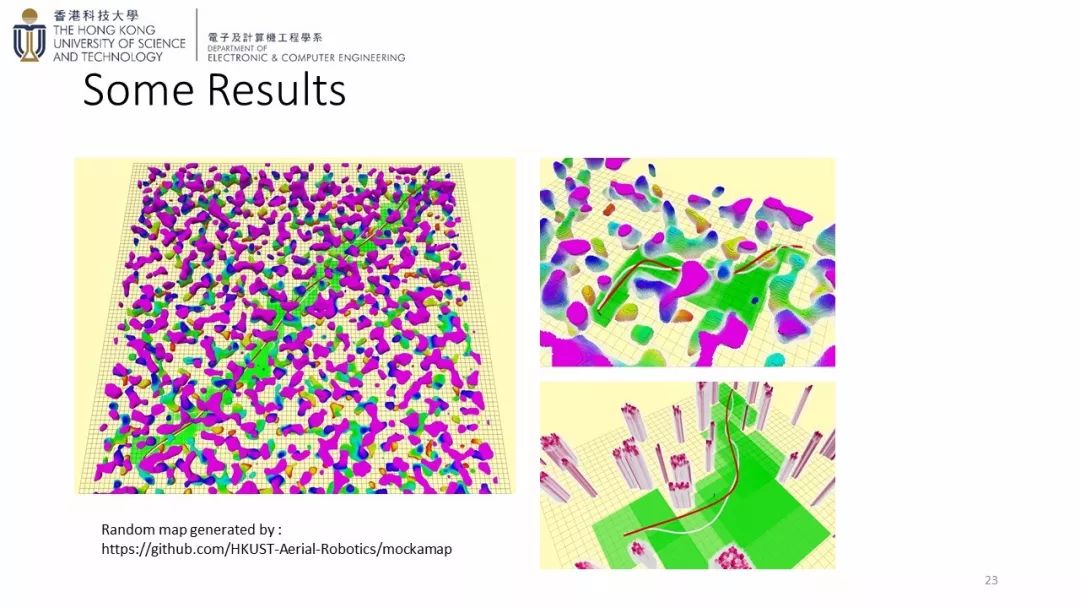
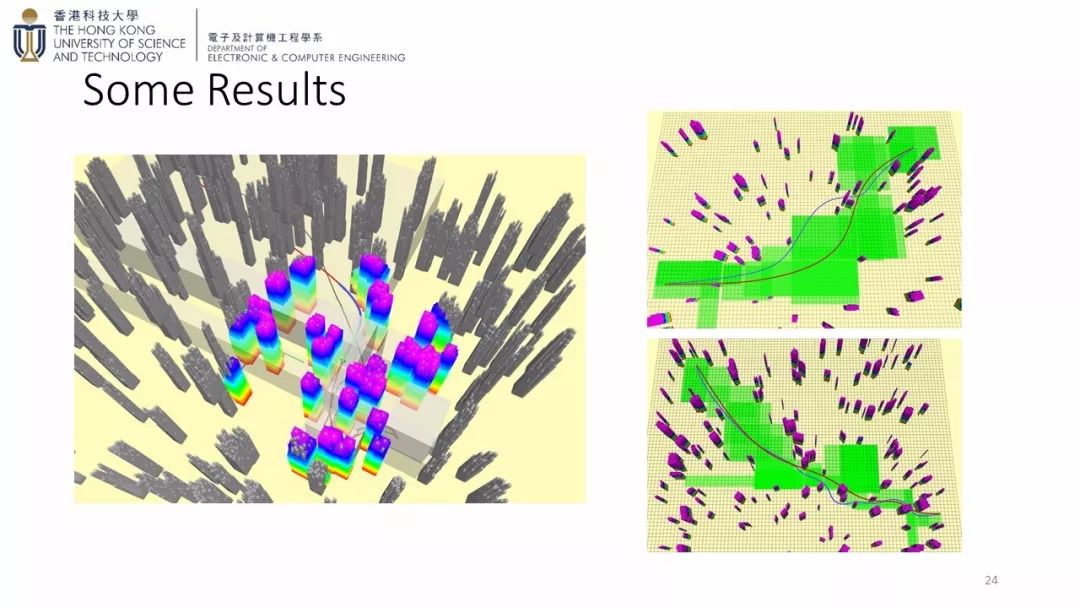
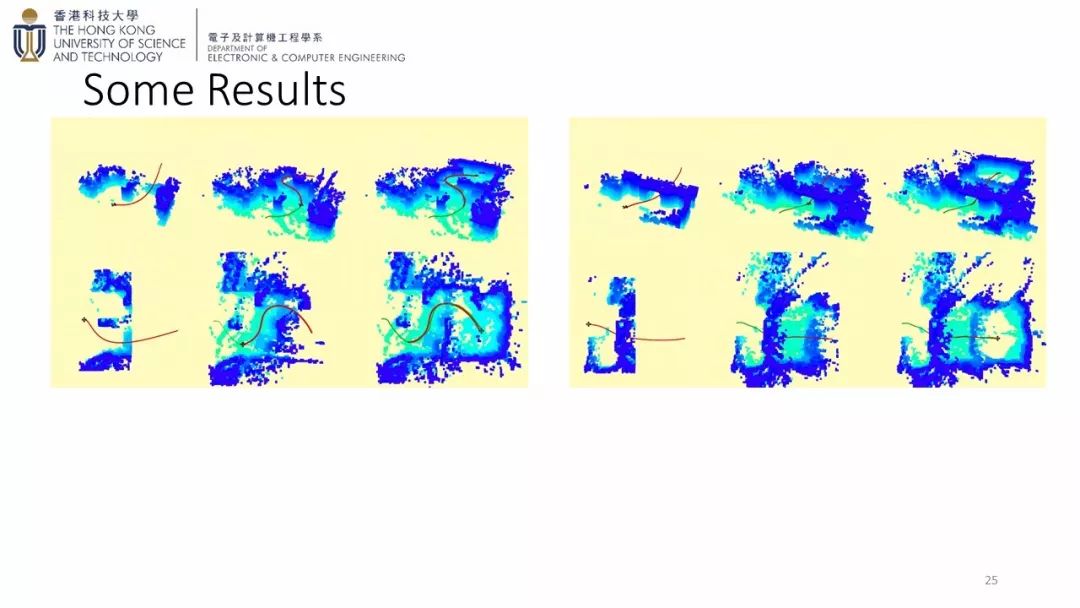
大家好,欢迎各位泡芙回到泡泡机器人公开课讲堂。本次公开课由高飞为大家带来一场精彩演讲,主要内容是:Online quadrotor trajectory generation and autonomous navigation。
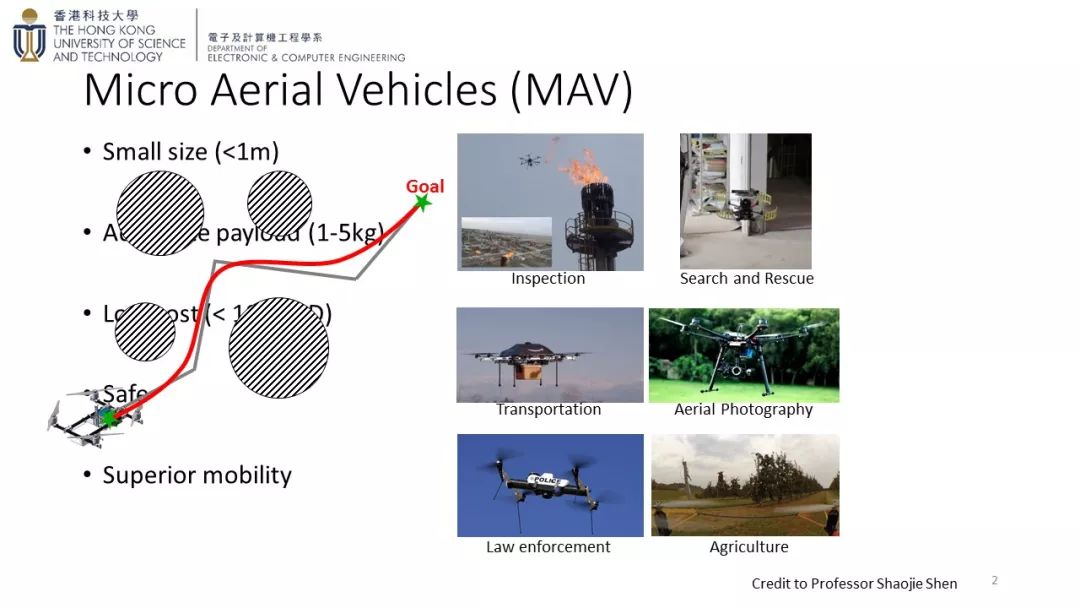
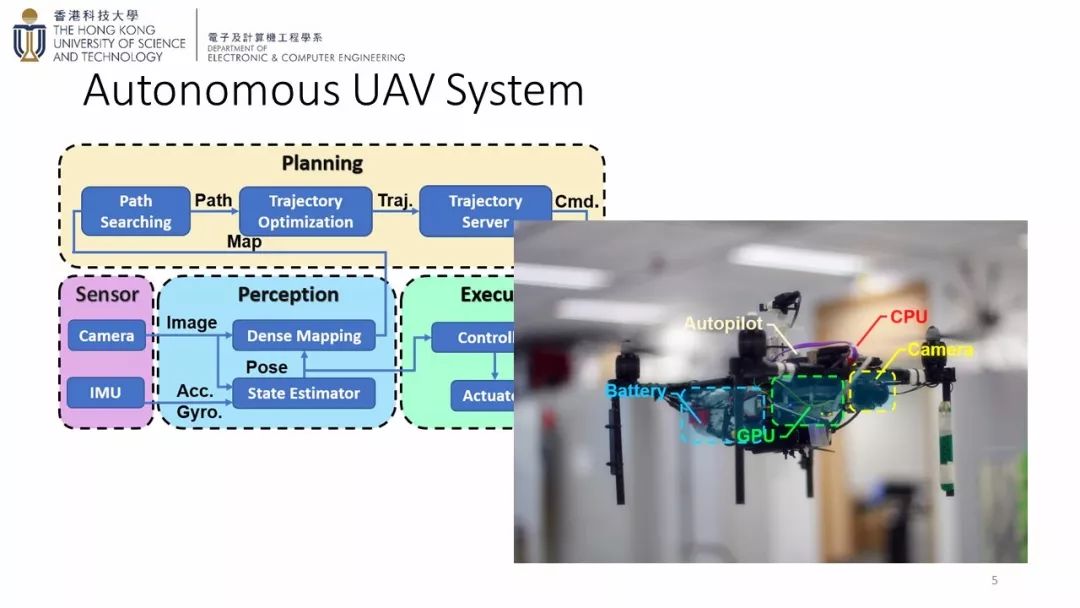
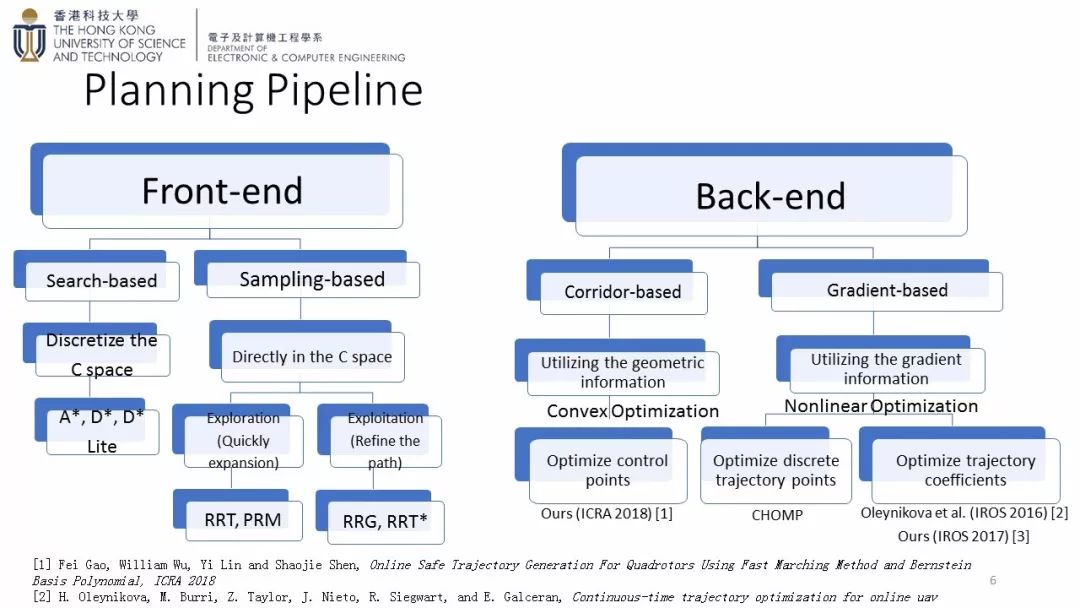
本次公开课,作者先整体介绍了无人机系统在复杂环境下的轨迹生成问题和算法的整体框架;接着对相关技术点和作者的工作做了详细介绍。文章结尾有这次课程的课件下载链接方式哟~



【资源链接】
在微信平台后面回复“93”即可获得本次公开课的全部资料。
【版权声明】
泡泡机器人SLAM的所有文章全部由泡泡机器人的成员花费大量心血制作而成的原创内 容,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
【转载授权】
商业转载请联系刘富强(liufuqiang_robot@hotmail.com)进行授权。普通个人转载,请保留版权声明,并且在文章下方放上“泡泡机器人SLAM”微信公众账号的二维码即可。
【编辑】游振兴
登录查看更多
相关内容

高飞获得了学士学位。2002年毕业于中国西安交通大学,理学硕士。2004年毕业于加拿大麦克马斯特大学,获博士学位。2007年获新加坡国立大学学位。他曾于2008年在新加坡a*STAR Infocomm Research(I2R)担任研究员,2009年至2010年在德国不来梅市雅各布大学(Jacobs University)工程与科学学院担任助理教授。2011年加入中国清华大学自动化系,现任副教授。
高教授的研究兴趣包括通信信号处理、阵列信号处理、凸优化和人工智能辅助通信。他撰写/合著了150多篇IEEE期刊论文和150多篇IEEE会议论文,这些论文在Google Scholar上被引用超过8000次。
高教授曾任《IEEE无线通信学报》、《IEEE信号处理选刊》(首席客座编辑)、《IEEE认知通信与网络学报》、《IEEE信号处理快报》、《IEEE通信快报》、《IEEE无线通信快报》和《中国通信》的编辑。他还担任了2019年IEEE通信会议(ICC)、2018年IEEE车辆技术大会春季(VTC)、2015年IEEE通信大会(ICC)、2014年IEEE全球通信大会(GLOBECOM)、2014年IEEE车辆技术大会秋季(VTC)的研讨会联合主席,以及50多个IEEE会议的技术委员会成员。
专知会员服务
136+阅读 · 2020年3月8日
专知会员服务
13+阅读 · 2019年11月17日
Arxiv
6+阅读 · 2018年1月28日



相关VIP内容
专知会员服务
136+阅读 · 2020年3月8日
专知会员服务
13+阅读 · 2019年11月17日
相关资讯
相关论文
Arxiv
6+阅读 · 2018年1月28日