【泡泡一分钟】C-blox:基于TSDF地图的一致可量化稠密建图方法
每天一分钟,带你读遍机器人顶级会议文章
标题:C-blox: A Scalable and Consistent TSDF-based Dense Mapping Approach
作者:Alexander Millane, Zachary Taylor, Helen Oleynikova, Juan Nieto, Roland Siegwart, C´esar Cadena
来源:2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)
编译:王凯东
审核:颜青松,陈世浪
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权

摘要

在实际生产生活应用中,对环境进行一致的稠密建图有助于机器人平台进行更高级的决策。通过视觉传感器提供的深度信息,我们已经有一些可以解决创建精确稠密地图的方案。然而,在机器人进行长期的任务操作过程中,这些地图重建的方式由于累积性的相机跟踪误差与延迟循环终止而很容易变得不一致。由于没能很好地解决地图一致性问题,从这些失真的图像视频中恢复变得尤为困难。
本文作者创建了一个可以解决地图一致性问题同时达到可量化标准的新型3D稠密地图系统,该系统以能代表环境的一系列重叠TSDF地图子卷为核心,它们用基于特征提取的相机跟踪和光束平差法进行定位。
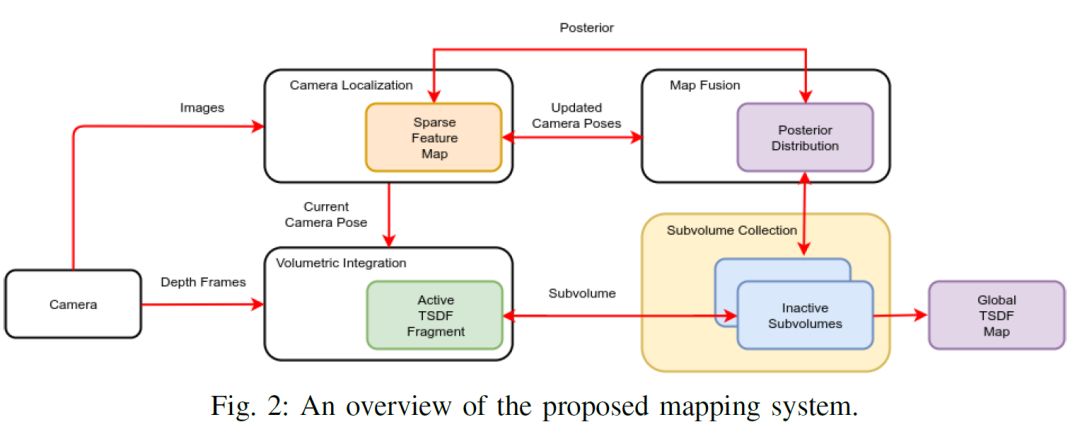
本文的主要贡献在于提供了一个在地图中识别稳定区域并融合到有效的子卷中的一种传递途径,该方法可以减少地图的扩张但仍保持一致性。
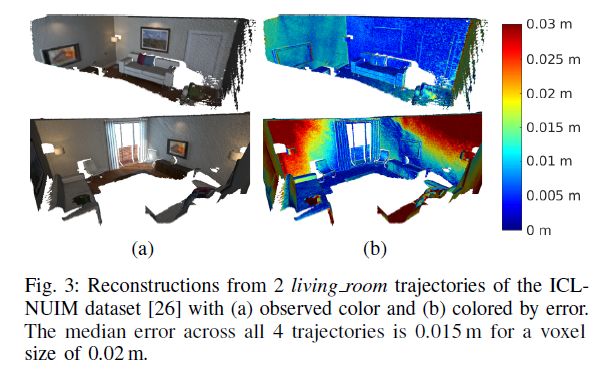
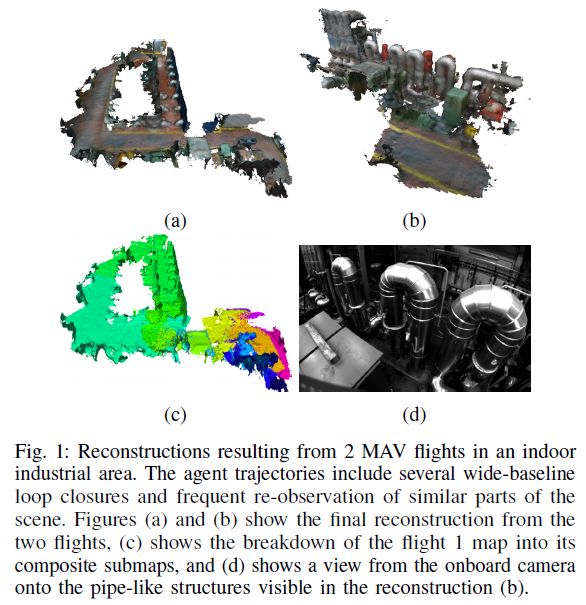
本文作者在一个开源数据集和仿真环境上演示了该系统,证实了该方法在建立一致性与可量化地图的良好效果,并最后在一个实时微型飞行器上进行了测试。

Abstract
In many applications, maintaining a consistent dense map of the environment is key to enabling robotic platforms to perform higher level decision making. Several works have addressed the challenge of creating precise dense 3D maps from visual sensors providing depth information.
However,during operation over longer missions, econstructions can easily become inconsistent due to accumulated camera tracking error and delayed loop closure. Without explicitly addressing the problem of map consistency, recovery from such distortions tends to be difficult. We present a novel system for dense 3D mapping which addresses the challenge of building consistent maps while dealing with scalability. Central to our approach is the representation of the environment as a collection of overlapping Truncated Signed Distance Field (TSDF) subvolumes. These subvolumes are localized through feature-based camera tracking and bundle adjustment. Our main contribution is a pipeline for identifying stable regions in the map, and to fuse the contributing subvolumes. This approach allows us to reduce map growth while still maintaining consistency. We demonstrate the proposed system on a publicly available dataset and simulation engine, and demonstrate the efficacy of the proposed approach for building consistent and scalable maps. Finally we demonstrate our approach running in real-time onboard a lightweight Micro Aerial Vehicle (MAV).
如果你对本文感兴趣,想要下载完整文章进行阅读,可以关注【泡泡机器人SLAM】公众号(paopaorobot_slam)。
欢迎来到泡泡论坛,这里有大牛为你解答关于SLAM的任何疑惑。
有想问的问题,或者想刷帖回答问题,泡泡论坛欢迎你!
泡泡网站:www.paopaorobot.org
泡泡论坛:http://paopaorobot.org/bbs/


泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com





