面向无人驾驶的车道级道路电子地图制作过程 | 厚势

厚势按:高精度车道级道路电子地图是实现车道级导航与监控的基础地理信息数据和必要条件,是全自动驾驶汽车不可缺少的一部分。湖南省第三测绘院的王静研究员在本文中探讨了车道级道路电子地图的具体制作流程。
大致的实现路径为:通过高精度、高分辨率的道路航空影像,结合具有三维激光扫描和全景数据采集功能的移动测量车采集的相关道路数据,从这些数据中提取满足亚米级导航与监控要求的道路路网数据,包括车道数、车道宽等属性数据,按照导航电子地图的要求制作高精度的道路电子地图。
在厚势之前推送的文章中,与「自动驾驶汽车专用高精度地图」相关的文章有不少,可作互相参照阅读:
17.10.16:《 地图在 ADAS 实现的技术方案以及 ADASIS 的工作原理 》
-
17.10.10:《「画」一张高精度地图有多难?》
-
17.10.09:《 DeepMap 吴夏青和他的高精地图团队 》
-
17.09.14:《 全球高精地图四小天王 》
17.09.12:《 自动驾驶数据之战:谁将挑战谷歌地图?》
随着交通网络的高速发展,人类对机动车辆的依赖性与日俱增,传统的车辆导航与监控精度和手段已经很难满足社会信息发展的需求,高精度车辆导航监控日益成为社会关注度热点问题。高精度车道级道路电子地图是实现车道级导航与监控的基础地理信息数据和必要条件,未来在无人驾驶汽车方面具有广阔的应用空间。
车载移动测量系统作为一种先进的测量手段,不仅具有快速、不与测量物接触、实时、动态、主动、高密度及高精度等特点,而且能采集大面积的三维空间数据和获取建筑物、道路、植被等城市地物的表面信息。
作为在道路上行驶的移动车载测量系统成为各行各业关注的对象,以汽车作为遥感平台,安装了高精度 GNSS 和高动态载体测姿 IMU 传感器,基于 GNSS/IMU 的组合定位定姿使车载系统具有直接地理定位(Direct Georeferencing,DG)的能力,实现了在测量区域内无需地面控制点就可以成图或扫描数据。
该项目充分利用现有的 CORS(Continuous Operational Reference System,连续运行卫星定位系统)平台资源,结合高效的车载移动测量系统(Vehicle Borne Mobile Mapping Systems),开展亚米级导航与监控要求的道路路网数据采集、处理和电子地图的制作。
1. 工作流程
车道级道路电子地图制作流程主要包括三部分:
移动测量数据采集和处理;
车道数据及属性信息提取;
车道电子地图制作。
1.1 移动测量数据采集和处理
(1)移动测量车作业流程
①前期准备,如需求分析和路线规划等;
②外业采集,根据规划进行外业数据采集;
③内业处理,主要指点云数据的生产;
④应用处理,在点云数据基础上进行后期应用。
(2)试验区选取
该次车道数据采集试验区选取长沙某高速公路隧道段,全长 16.2 km。该路段为双向 6 车道,途经 2 个服务区、3 个立交、1 个收费站和 3.6 km 长的隧道。
(3)数据采集

图 1 SSW 系统部件集成示意图
该次数据采集采用了四维远见公司研发的 SSW 车载激光移动测量系统,该系统集成了多个传感器,包括激光扫描仪、GPS、惯导 IMU、控制系统 PC104、里程计、DMI(Digital Measurable Images,可量测实景影像)、相机等,见图 1。从车载激光移动测量系统获取的高密度真彩色三维激光点云数据中可分辨车道分道线、停止线、人行横道线等细节信息,为提取道路路面详细信息提供了充足的源数据。
该次作业时间为 201 4年 4 月 14 日上午,道路往返测量,全程作业时间约 60 min,路线长度33.1 km。在作业之前,向湖南 CORS 中心申请了测区附近的 3 个 CORS 基站,分别是NJGT、NJJN、NJPK, 用于后期 GPS/IMU 数据解算。另外,根据作业当时的天气条件,调整相机的参数,确保照片数据亮度和色彩能与激光点云匹配。
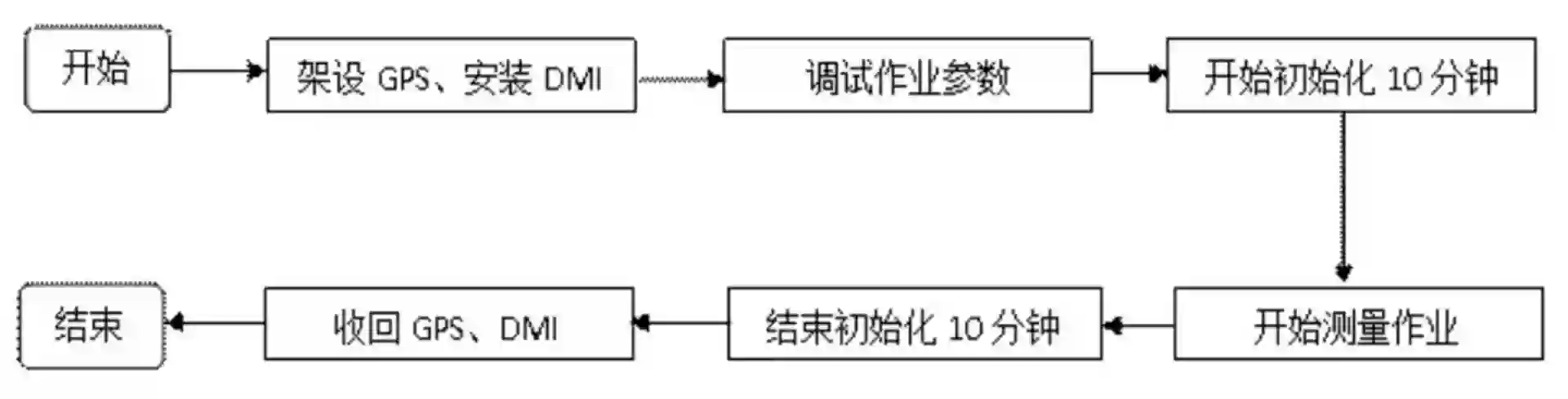
图 2 SSW 系统数据采集流程图
参数设置完成后,启动流动站 GPS、PC104、IMU,开始静态初始化工作,保持车辆 10 min 以上静止不动,之后再进行测量作业。作业过程中移动测量车行驶车速以所在车道允许的最低行驶速度为准,该次车速为 60 km/h,并且避免以超车为目的的变道、提速。作业结束后,先结束激光扫描仪,再结束相机曝光,保持车身静止10 min,做结束初始化,之后依次关闭 IMU、流动站 GPS、基站 GPS,结束工作,见图 2。
(4)内业数据处理
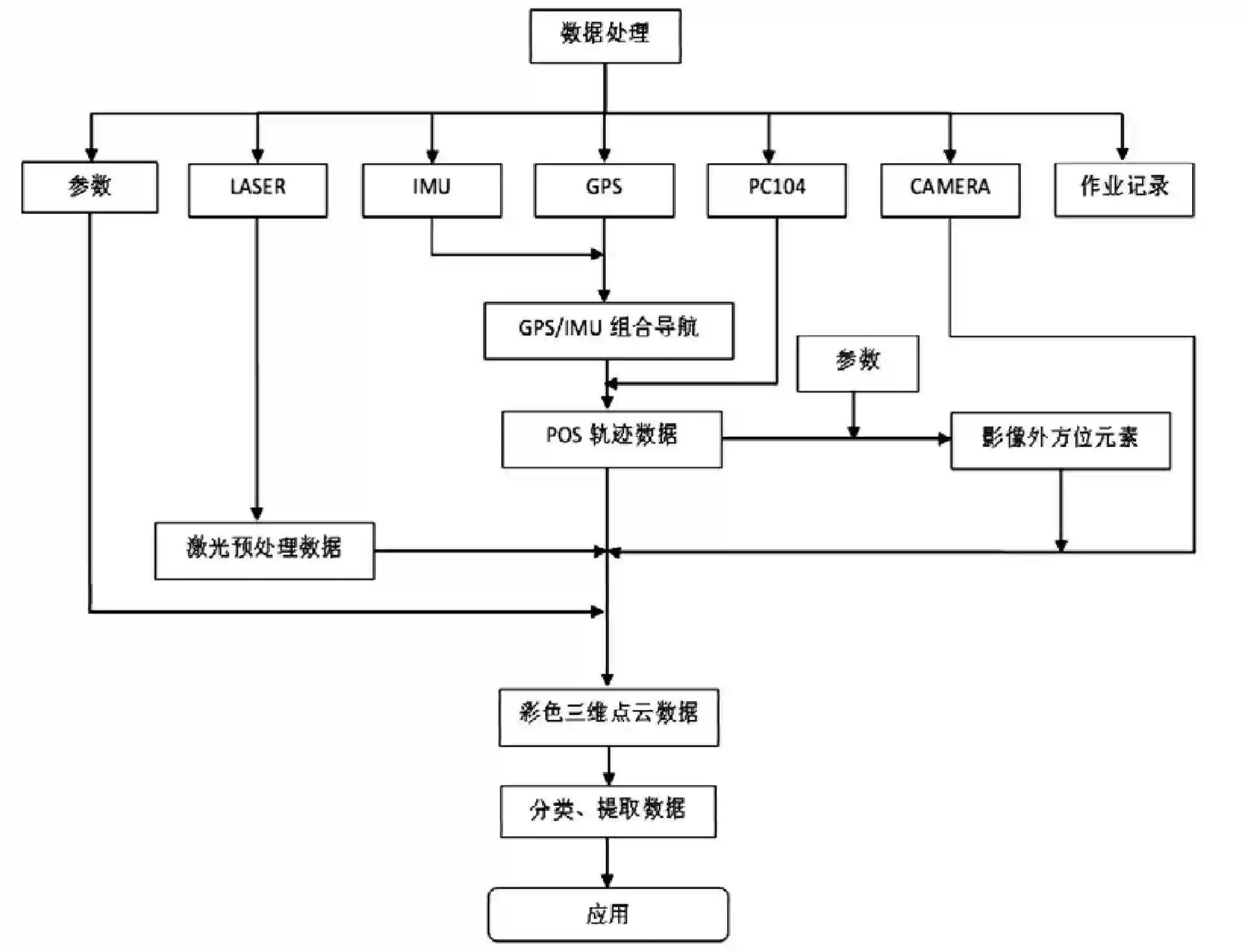
图 3 SSW 系统数据处理流程图
数据采集结束后,需要及时整理和处理数据,以确定数据的有效性。SSW 移动测量车一次作业获取的数据主要包括:激光点云、GPS/IMU 数据、数码影像数据等。数据处理的流程见图 3。
① POS 轨迹解算
利用车载 GPS/IMU 联合预约的 3 个湖南 CORS 基站差分解算测量车实时位置,坐标采用国家 CGCS2000 坐标系。由于该次行车路段有较长的隧道,隧道内无法获取有效 GPS 信号,加入 DMI 数据参与组合导航数据解算。解算结果叠加已有的 DOM 影像数据进行了检查,吻合度较好。
② 影像外方位计算
利用 POS 文件与相机的标定参数解算出车载 6 个相机的影像外方位 EO 文件,包含每一张影像数据的坐标、三个姿态角等信息。
③ 彩色点云解算
利用 POS 文件解算出激光点云数据的三维坐标,匹配影像数据输出 RGB 彩色点云。彩色点云数据格式为 *.bxyz,除了三维点云,还包含坐标信息、颜色信息、强度信息、回波信息、扫描线信息等其他相关信息。该次获取的点云平均点间距小于 10 cm,坐标系使用高斯克吕格 3° 带投影,中央经线选择 118.5°,高程使用大地高。
④ 点云精度检测
解算出的车道彩色点云数据中包含了极为丰富的地理空间信息,如标牌、路灯、车道线、路边线等。在高密度的彩色三维点云数据上采集车道分道线、人行横道线、交叉路口停止线、交通信息灯等信息,既方便又能达到较高的空间几何精度。
为了验证车载激光三维点云数据的精度能否满足车道导航数据的精度要求,项目组使用 CORS-RTK 设备在道路路面选取了较为明显、易于分辨的地物作为精度检测点,主要选择车道标示线及少量路灯。将实测的 RTK 控制点与三维点云数据相叠加,并选取与控制点对应的同名点云,得到一组平面坐标数据,通过对该组数据进行差值比较和统计,得出车载激光三维点云数据绝对测量精度。
该次 RTK 检测点一共有 124 个,主要检测 XY 平面误差。检测中误差 0.06 m,95% 的点都在0.1 m 以内,点云数据的几何精度非常高,为后期基于点云的车道级道路电子地图的制作提供了精度保证。
1.2 车道数据及信息提取
车道数据提取是从彩色点云中采集和提取制作地图所需的车道线、安全岛、绿化带、里程桩、杆状物(路灯、摄像头、交通灯和指示牌等)、交通护栏等特征点线,以及相关属性信息(等级、材质、类型、宽度等)。
车道数据提取使用与 SSW 系统配套的 SWDY 数据处理软件先自动提取特征点,然后再人工根据彩色点云检查修正,最后根据同步相机获取的高清影像提取相关属性信息,例如,车道名称、等级、类型、材质、宽度等。
利用 SWDY 软件,采用梯度滤波与邻域取低点处理的提取方法,首先进行道路边线粗提取,道路边线点基本被保留下来;再用管道滤波的方法对该结果进行聚类分析,剔除离散点。
杆状物点云提取,结合了 SSW 系统各个传感器之间的特殊属性,综合考虑数据特征、物体的物理发生以及其与测量车测量时的相对位置关系进行分类提取。提取时,将测量车行车轨迹与要提取的目标物之间的距离、高差、其自身形态分布特征,甚至颜色信息结合起来,各个参数可以可视化的进行调整,调整后即可看到该组参数的提取效果。通过这种可视化的方式调整提取参数,直到效果满意为止。
1.3 车道电子地图制作
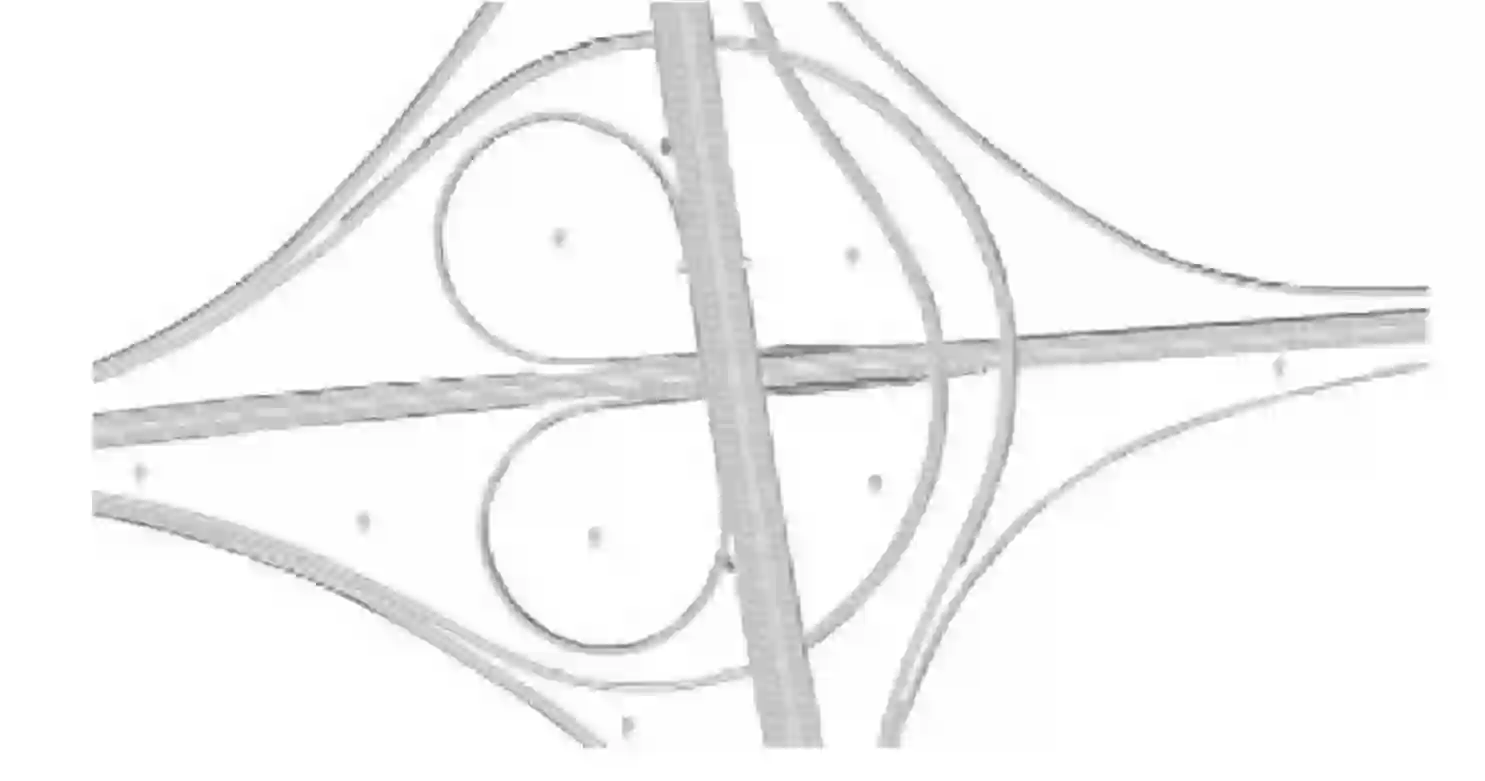
图 4 大型立交配图效果图
车道电子地图是根据采集的特征点线,以及相应的属性信息, 在 ArcGIS 软件中,经过符号化处理、图面整饰、晕渲后可形成色彩协调、图面美观的显示地图。
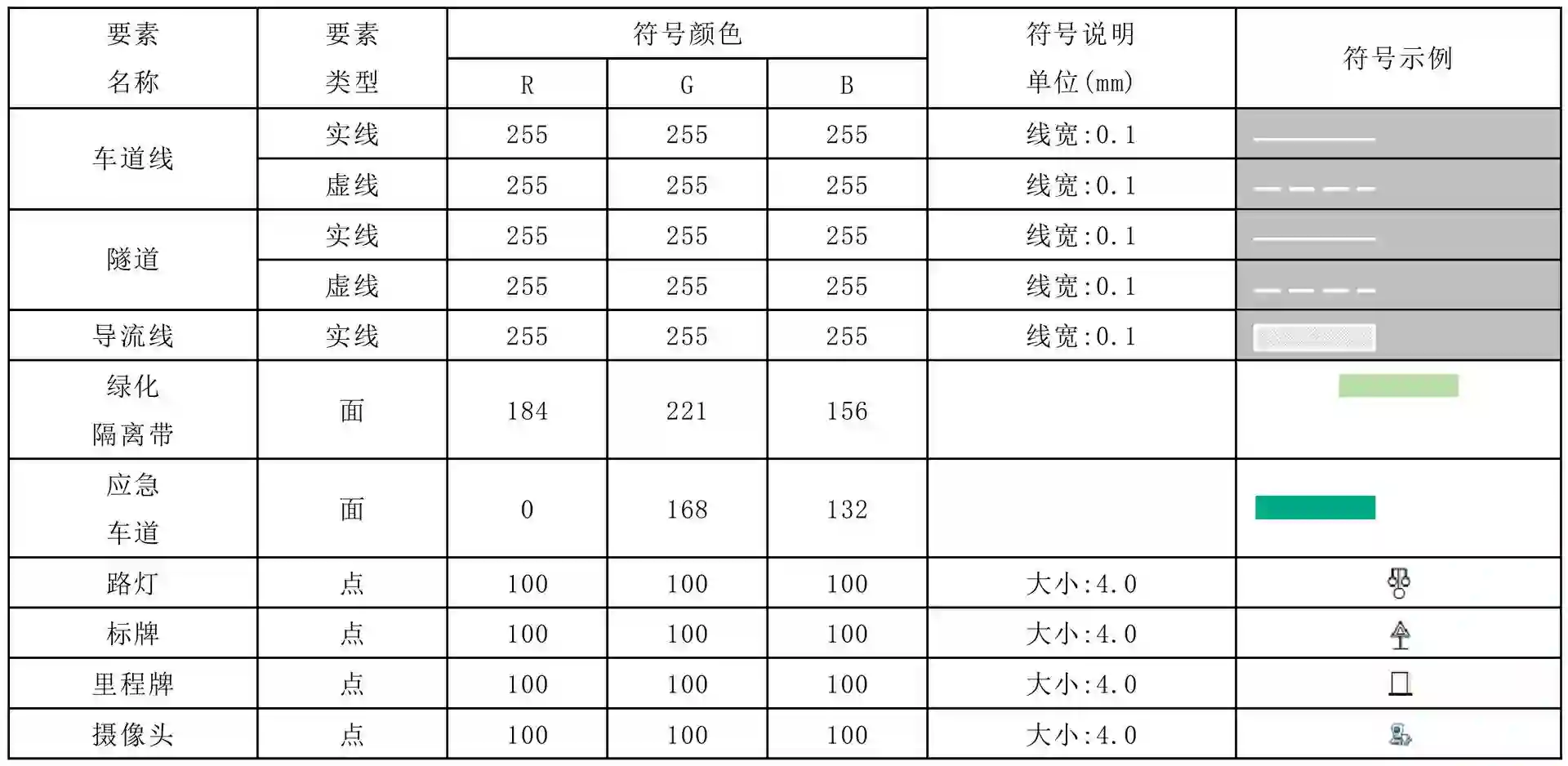
为了使电子地图的色彩协调、符号形象、图面美观,设定了要素显示符号的配图要求(包括要素及注记的样式、规格、颜色等),详见表 1。通过 ArcGIS 地图配置,完成了该项目的车道电子地图的制作,局部示意图见图 4。
表 1 车道电子地图要素配图示例
2. 结语
车载移动测量系统精度高、速度快、数据丰富,完全能够满足道路各项基础地理信息数据获取的要求,制作高精度的道路电子地图,甚至三维电子地图。
随着我国北斗导航系统的发展,任意时刻都可观测到超过 15 颗 GNSS 卫星,弥补了 GPS 在亚洲区分布不良的缺点,实现了利用 GNSS 进行实时精密车辆定位。
高精度的车道级电子地图与车辆实时定位技术的结合,在未来可以预见将助力推进智能无人驾驶汽车的发展,在智能交通管理、高级驾驶辅助系统(ADAS)等领域有着广阔的应用前景。
参考文献
[1] 王果,崔希民,袁德宝. 车载激光点云领域比较的道路边线提取方法[J]. 测绘通报,2012(9):55-57
[2] 谭贲,钟若飞,李芹.一种车载激光扫描数据的地物分类方法[J]. 遥感学报,2012,16(1):50-66
[3] 马浩,王留召.基于车载激光点云的道路边线自动分类与提取[J]. 测绘科学,2014(6):126-132
[4] 吴宾,余柏蒗,岳文辉,等.一种基于车载激光扫描点云数据的单株行道树信息提取方法[J]. 华东师范大学学报:自然科学版,201(3 2):38-49
[5] 高自强,王忠仁.3维激光扫描树干提取与建模研究[J]. 测绘与空间地理信息,2012:35(7):79-81,85
整理编辑:厚势分析师拉里佩
转载请注明来自厚势和厚势公号:iHoushi
-END-
厚势往期推送精选


文章精选
企业家
智能驾驶
苹果公司造车?库克又不傻!iPhone的挣钱效率比造车高多了!
新能源汽车
项目和评论
这些大神从Google出走,创办了五家(命运各异的)无人车公司
厚
势
汽
车
为您对接资本和产业
新能源汽车 自动驾驶 车联网
联系邮箱
bp@ihoushi.com

点击阅读原文,查看文章「中国联通:车联网关键技术及演进方案研究」


