【泡泡图灵智库】使用平面特征IMU-Kinect融合SLAM的退化情况检测与补偿
泡泡图灵智库,带你精读机器人顶级会议文章
标题:Detection and Compensation of Degeneracy Cases for IMU-Kinect Integrated Continuous SLAM with Plane Features
作者:HyunGi Cho, Suyong Yeon, Hyunga Choi and Nakju Doh
来源:Sensors 2018
播音员:
编译:曾攀
审核:王禹
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权

摘要

在一组通用几何图元中,基于平面的特征由于其对噪声的鲁棒性而被广泛用于室内定位。然而,由于缺乏线性独立的平面可能导致不正常的估计。这反而会导致退化状态,无法估计所有状态。为了解决这个问题,本文首先提出了一种退化检测方法。然后解释了一种通过投影惯性测量单元(IMU)信息来确定方向的补偿方法。实验采用IMU-Kinect v2集成传感器系统,由于其视野狭窄,容易陷入退化状态。结果表明,所提出的框架可以通过成功检测和补偿退化方向来提高地图精度。
主要创新点
通过评估二次矩阵的特征值的比值来检测两组平面特征之间的退化性;
通过将IMU的方向值投影到相应平面特征上来补偿遇到退化的方向.
算法流程

图1:提出的连续3D SLAM框架示意图,黄色框是本文的贡献
如果使用少于三个独立的平面对,就会导致退化。
A. 退化检测算法

图2 左右点云的可能情况下基于平面特征的姿态估计
(a)3对对应 (b)2对对应 (c)假2对对应 (d)1对与相同法线对应
当有超过3对平面对时,能估计出6DoF参数(3平移,3旋转)。然而,当其中存在有一对平面有相同的法向量时,分别对旋转和平移产生1和2个自由度的退化。由于噪声,可将一对平面对应显示为两对虚假对应。此时提出能区分真实和虚假两对对应的算法。
使用第二矩阵,其中,秩和特征值的比率分别表示线性独立对应平面的数目以及独立对应之间的区别。

特征分解:
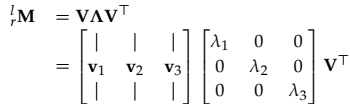
特征值的比值是用来区分有效秩的,且真实和虚假的2对对应也能由此比率。接近0就是虚假匹配,高于某个阈值就是真实匹配。需考虑到传感器噪声级别来选择合适的阈值,Kinect2的深度变形服从范围在6mm左右的波动。在这个变形下,使用基于平面的方法,位姿间的协方差估计为4°。
B.退化旋转的补偿方法
对于一对的情况,平面的旋转法向量数目不能估计出来。IMU测量值只被用于补偿不能通过特征估计出来的相对于旋转的病态项。
方向退化的补偿:

主要结果
为进行性能验证,SLAM实验在两个不同的传感器系统中进行。一个(图a)是低成本的传感器系统,具有Kinect v2和廉价的IMU(CH-UM7:±4°用于动态俯仰/滚转精度,±8°用于动态偏航精度)。另一个(图4b)是高成本的传感器系统,具有Velodyne LiDAR(HDL-32E)和MicroStrieIMU(3DM-GX3-45:±2°,用于动态俯仰/滚转/偏航精度)。高成本系统的目的是提取地面真相,并配备低成本系统进行严格的验证。

图3 (a)手持式低成本感应器系统;(b)背包式高成本感应器系统
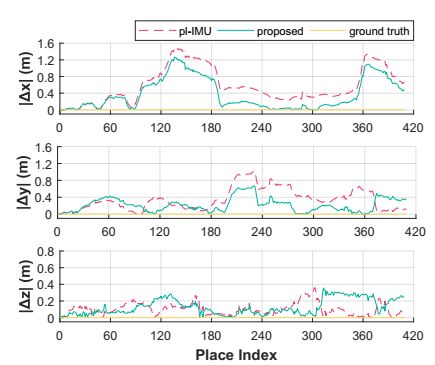
图4 平移的局部误差

图5 平移误差箱式图
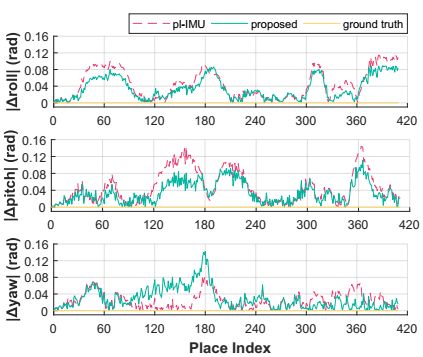
图6 旋转的局部误差
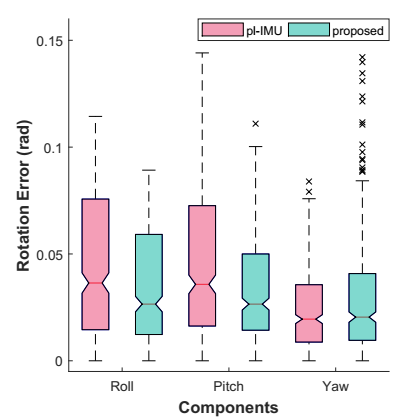
图7 旋转误差箱式图
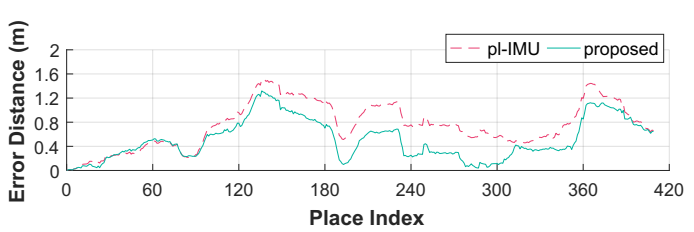
图8 每种补偿方法的局部误差距离与地面真相的比较
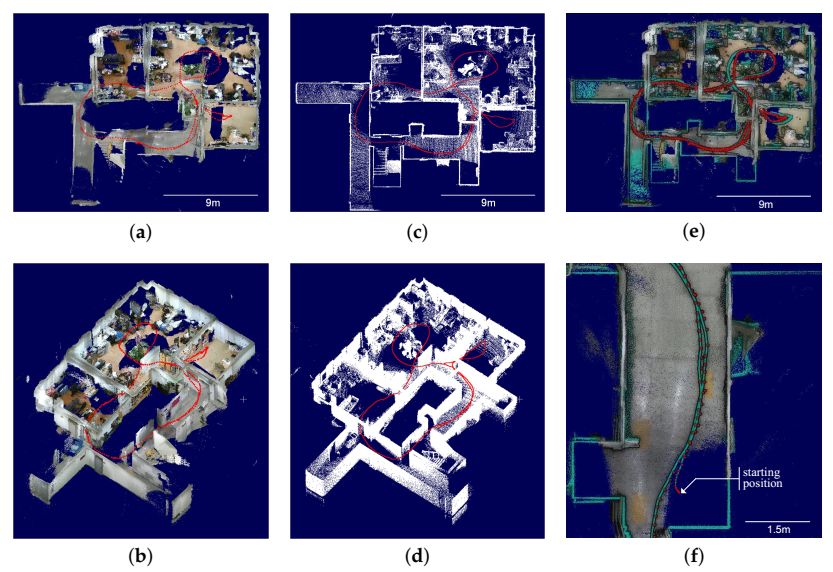
图9(a)优化的地图俯视图;(b)优化的地图鸟瞰图; (c)地面实况顶视图; (d)地面实况鸟瞰图; (e)叠加地图顶视图; (f)叠加地图特写视图。(a,b)显示使用低成本传感器系统通过所提出的方法优化的RGB-D图。(c,d)显示使用高成本传感器系统获得的基本事实。(e,f)显示优化地图与地面实况之间的叠加地图,其中绿色点云和轨迹是基本事实。为了改善深度可视化,将眼顶灯照明着色器应用于(e,f),其中地面实况的点云被随机地二次采样10%
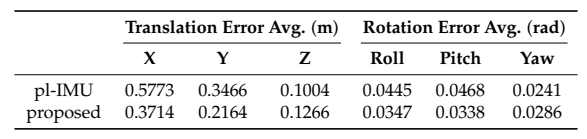
表1:两种不同方法的三维位姿平均误差

Abstract
In a group of general geometric primitives, plane-based features are widely used for indoor localization because of their robustness against noises. However, a lack of linearly independent planes may lead to a non-trivial estimation. This in return can cause a degenerate state from which all states cannot be estimated. To solve this problem, this paper first proposed a degeneracy detection method. A compensation method that could fix orientations by projecting an inertial measurement unit’s (IMU) information was then explained. Experiments were conducted using an IMU-Kinect v2 integrated sensor system prone to fall into degenerate cases owing to its narrow field-of-view. Results showed that the proposed framework could enhance map accuracy by successful detection and compensation of degenerated orientations.
如果你对本文感兴趣,想要下载完整文章进行阅读,可以关注【泡泡机器人SLAM】公众号。
点击阅读原文,即可获取本文下载链接。
欢迎来到泡泡论坛,这里有大牛为你解答关于SLAM的任何疑惑。
有想问的问题,或者想刷帖回答问题,泡泡论坛欢迎你!
泡泡网站:www.paopaorobot.org
泡泡论坛:http://paopaorobot.org/forums/


泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com




