【UCLA】基于深度神经网络的工业大模型预测控制,36页ppt
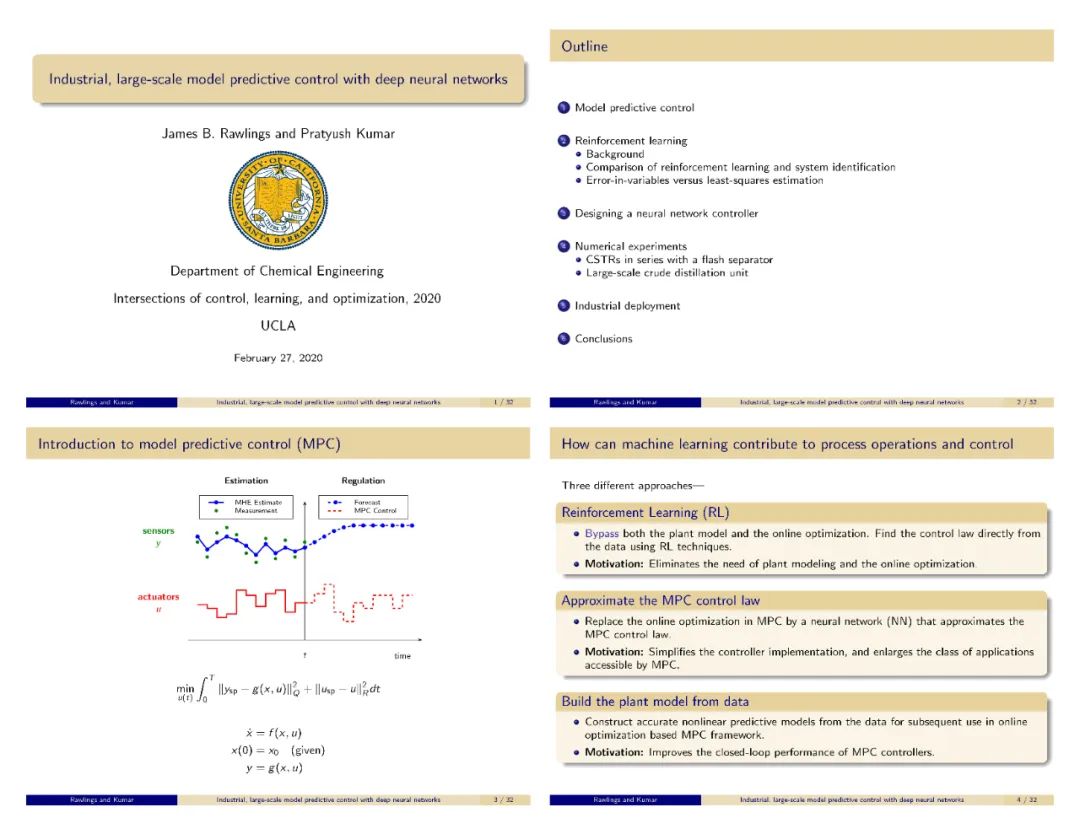
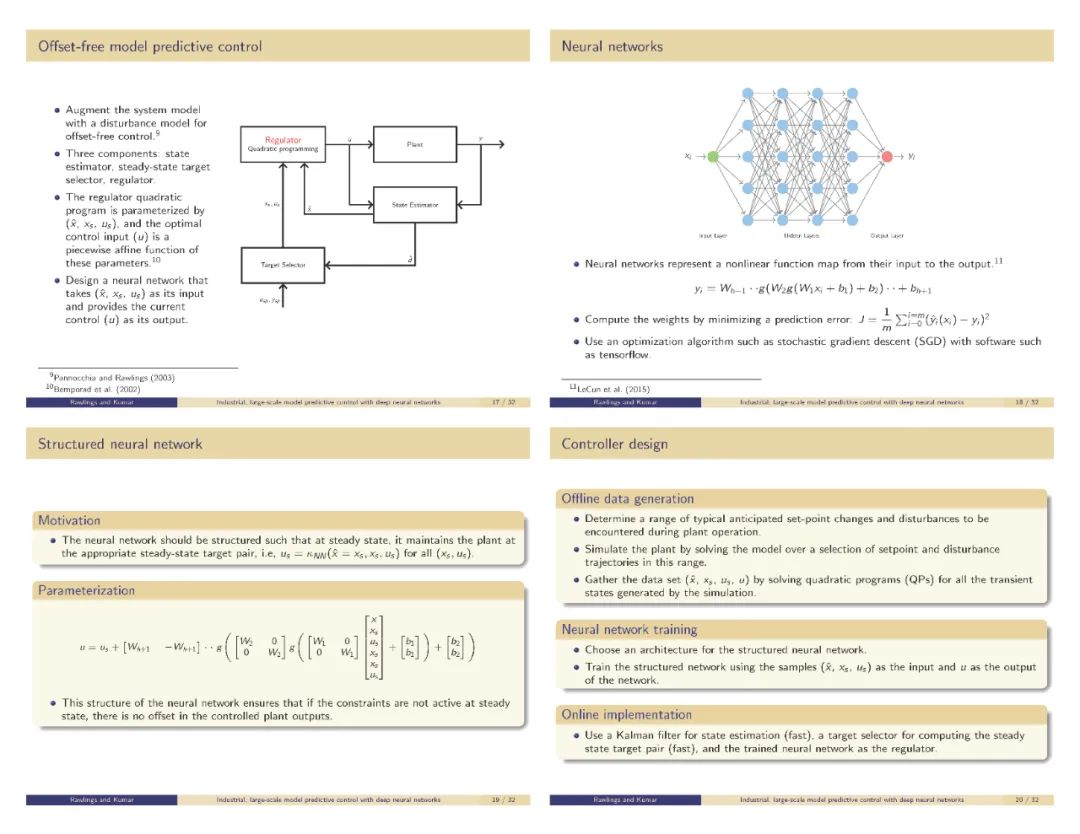
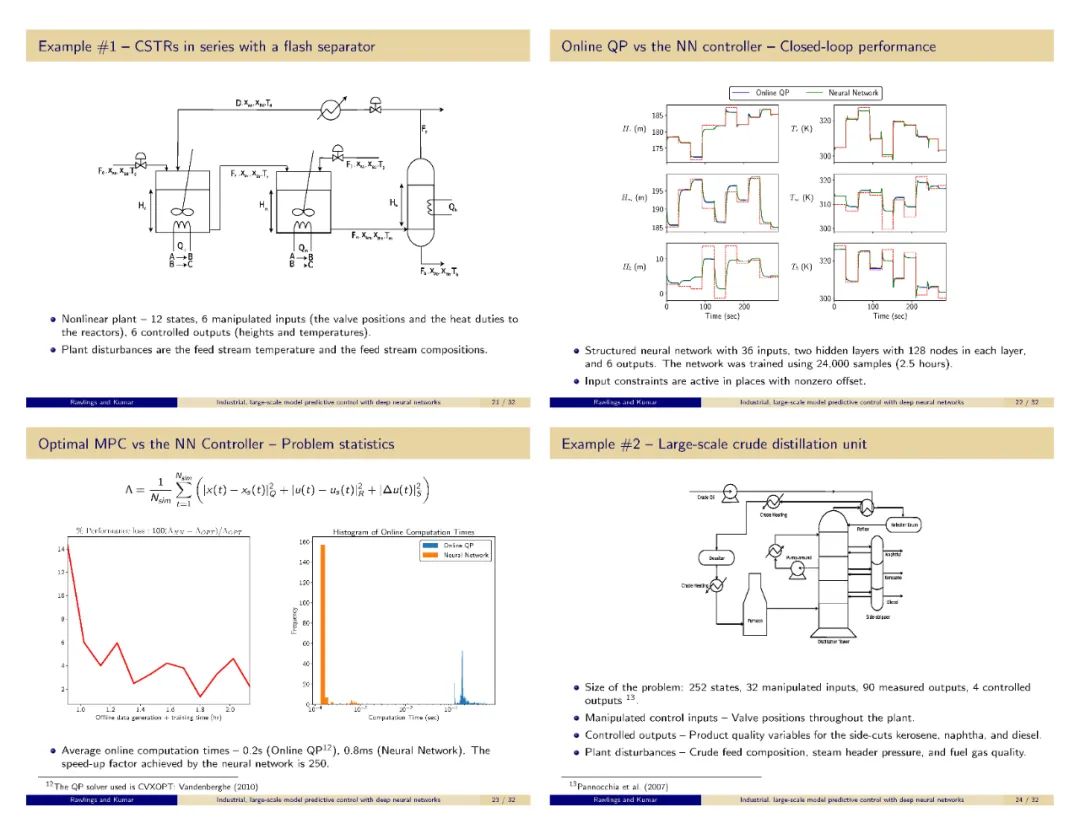
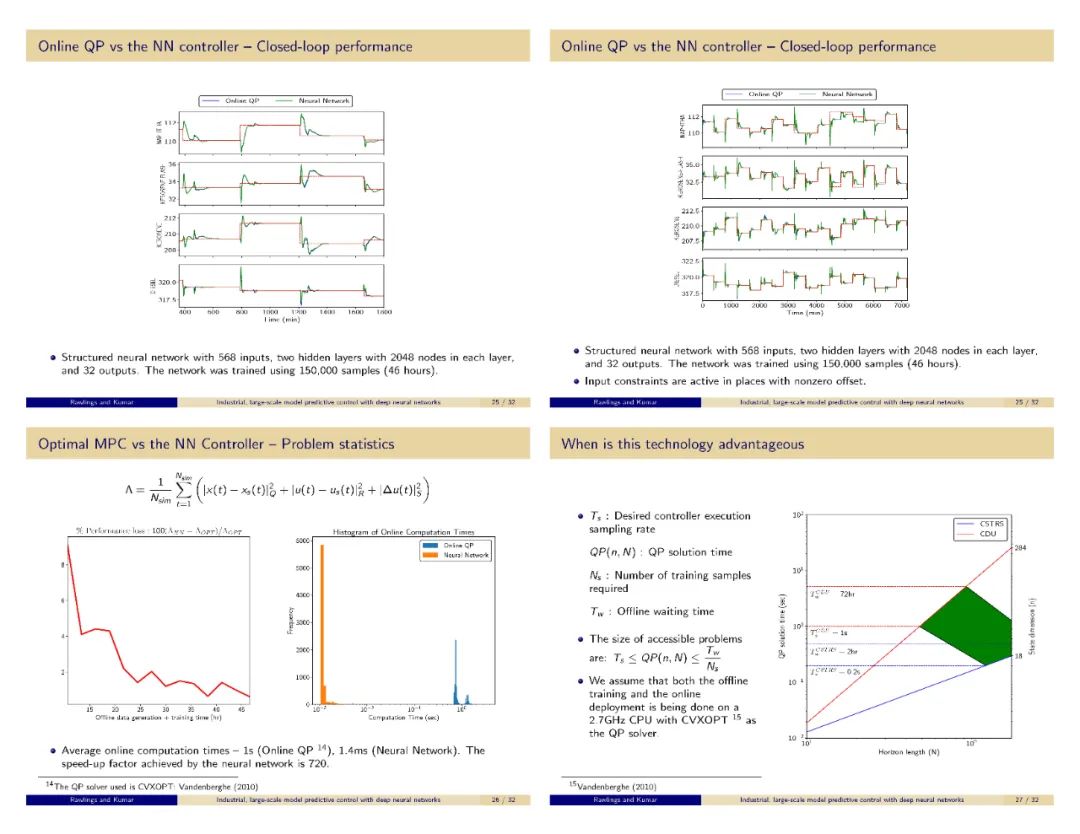
线性模型预测控制的工业部署需要一个凸二次规划(QP)的实时解。QP的显式解刻画了MPC控制律的特征,即状态的分段仿射函数和一些无偏移量控制的稳态目标的计算。众所周知,显式控制律的复杂性随着问题规模的增加呈指数级增长,使得离线描述和在线部署使用显式控制律对任何合理规模的工业工厂都是难以处理的。最近的观察表明,以修正线性单元(ReLU)为激活函数的深度神经网络也代表一个分段仿射函数,这使得它们成为获得精确逼近显式MPC控制律的有吸引力的候选对象。通过大型化工实例的数值实验,验证了该方法的可扩展性。


专知便捷查看
便捷下载,请关注专知公众号(点击上方蓝色专知关注)
后台回复“DL36” 可以获取《基于深度神经网络的工业大模型预测控制,36页ppt》专知下载链接索引



登录查看更多
相关内容

专知会员服务
24+阅读 · 2019年12月30日
Arxiv
10+阅读 · 2018年5月10日
Arxiv
8+阅读 · 2018年3月13日




相关VIP内容
专知会员服务
24+阅读 · 2019年12月30日
相关资讯
相关论文
Arxiv
10+阅读 · 2018年5月10日
Arxiv
8+阅读 · 2018年3月13日