ICCV2019 Oral | 用于人群计数的贝叶斯损失函数
点击上方“CVer”,选择加"星标"或“置顶”
重磅干货,第一时间送达

作者:Zee Jay
https://zhuanlan.zhihu.com/p/91834072
本文已授权转载,未经允许,不得二次转载
1.Contribution
本文全程把counting当作是一个概率问题,预测的density map是一个概率图,每个点表示该点处有人存在的概率,把density map每个点看作是样本观测值,然后这个点存在某个人的概率当作先验概率,用均匀分布表示,即每个点可能存在N个人中的某一个,或者是背景,然后基于观测值和先验概率,我们可以估计该点处是否存在某个人的后验概率,后验概率其实是对真实分布的估计,ground truth就是真实分布,因此拿后验概率与真实概率做差,就可以作为loss去优化模型
2.Method
(1)关于贝叶斯估计的背景知识
贝叶斯估计是参数估计的一种,所谓参数估计,就是实现假定数据服从某个分布,比如高斯分布,那么我们就希望通过实际的数据去确定高斯分布N(μ,σ)的均值μ和方差σ,这两个一旦确定,我们就相当于获得了数据的预测模型,大致上对未来获得的新的数据心里有了大概的一个估计,
参数估计最常用的有极大似然估计和贝叶斯估计,极大似然估计的基本思想是,当取得一组观测数据之后,μ和σ取什么值,最可能会得到这组观测数据,就像医生看病一样,他通过询问你问题,获得有关病情的观测数据,然后他就在推断,哪种病最可能会导致病人的这种状况,极大似然估计就是在做这个推断,具体的方法是要将概率密度函数乘起来,代入观测值,并求导,找到极值的过程,这里不展开,但是你得知道,极大似然估计它估计了一个具体的μ和σ的值
贝叶斯估计不像极大似然估计那么绝对,就认为μ和σ就是算出来的两个值,贝叶斯估计它通过观测值去估计μ和σ可能服从的分布,也就是说,贝叶斯估计,估计的是参数本身服从的分布,相比于极大似然估计的精确估计,贝叶斯估计则是一种模糊的估计,具体如下:
事先,你也要假设一下参数服从的分布,如果有事先的经验,那就可以根据经验设计一个参数服从的分布,如果事先啥都不知道,那么就先假设维正态分布,因此我们称这个事先假设的参数分布为先验分布,
即常用p(θ)=π(θ),π表示某种先验分布
当然先验分布只是事先假设,不一定对,我们要通过观察数据样本,根据观察值,来对先验分布进行修正,用D表示一组观测值,如下所示:
基于这组观测值,我们可以利用贝叶斯定理,反推这样一组观测值是θ取某个值所导致的概率的大小,以下就是贝叶斯定理的公式了:
这个通过贝叶斯公式推断的各种θ的可能性,就是θ所服从的后验分布,也就是根据观测值修正后的分布,所以其实贝叶斯公式只是一个公式,贝叶斯估计是拿贝叶斯公式进行参数估计的一种估计方法
其实到这里已经用完了贝叶斯估计了,接下来你若一定要得到参数θ的一个估计值,那往往用后验概率的期望值去作为参数θ的估计值:
上面这个就是连续随机变量的期望计算公式
(2)看看本文怎么把贝叶斯估计跟counting结合的
首先本文从某个人出现在某个位置的概率问题用贝叶斯估计去代入,如下所示:
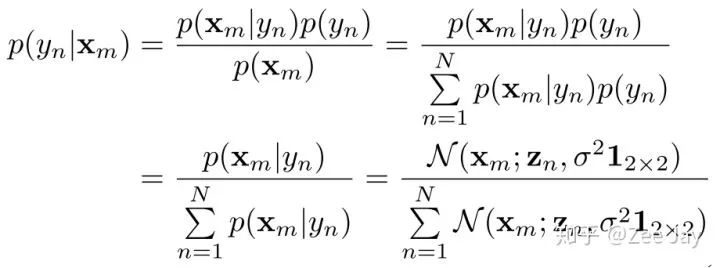
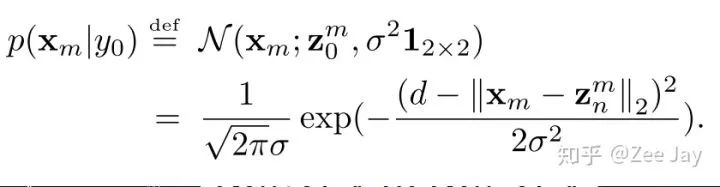
Xm表示density map上某个位置,yn表示第n个人,总共是N个人,观测值是Xm,表示Xm处观测到一个人,然后p(yn|Xm)在Xm处观测到的人是yn的概率,Xm处观测到的人可能是N个人中的任意一个,所以先验分布p(yn)用均匀分布1/N表示,然后p(Xm|yn)表示yn出现在Xm处的概率,那么这个概率好表示,文中用了2D的高斯分布表示:
等于:
Zn表示yn这个人所在的坐标,也就是说距离yn越远,那yn出现在这里的概率就越小。
以上p(yn|Xm)就是Xm处要是存在一个人,那么这个人是yn的概率,然后利用期望,本文求了yn这个人出现在整张图上的概率
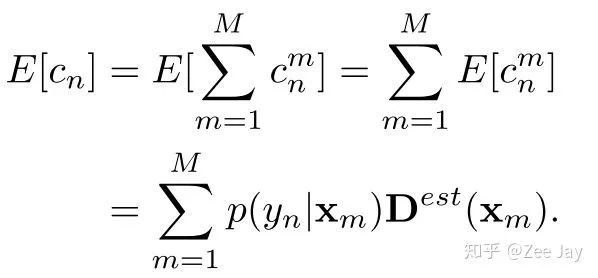
预测的density map有M个点,然后每个点的值代表该点处存在一个人的概率,然后结合后验概率p(yn|Xm)的概念,上面的公式表示yn这个人在整张density map上出现的概率,当然他是存在的,且应该是1,所以ground truth就是1,所以loss可以表示为如下所示:
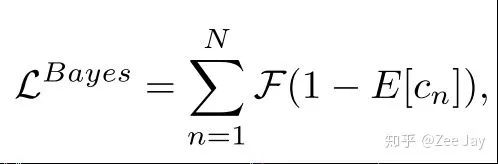
这就是本文的核心,即贝叶斯loss,F在这里表示L1的loss,即绝对误差。因此本文是在根据预测的density map,来推断每个标注了的人存在的概率,期望每个标注了的人存在的概率接近于1。
(3)测试的时候怎么做
以上贝叶斯loss的推断过程解释了本文如何训练模型,但是测试的时候,我们就是输入图片,输出一张density map,然后如何表示预测的人数呢?还像以前一样对density map求和就表示人数了吗?答案是yes!按照概率的思想,根据预测的density map,我们用期望的方式去分析每个标注了的人存在的概率,然后加起来,就是总人数,按照这个逻辑,我们得到了下面的公式:
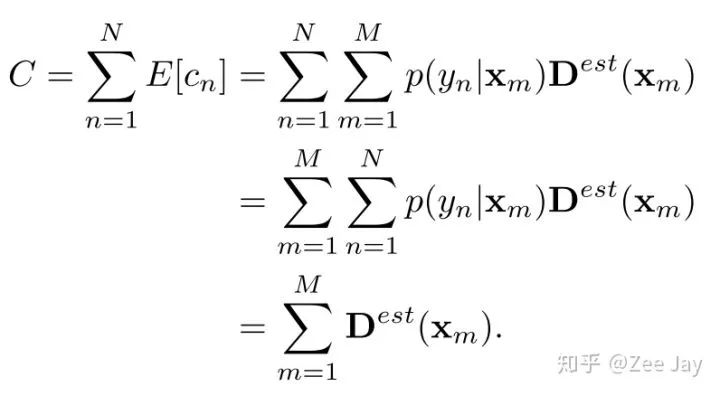
但是对于测试图片,我们不知道标注的人在哪里,因为没有标注,即图中的p(yn|Xm)不知道,但是把两个求和Σ的顺序对调,先对p(yn|Xm)求和,那因为这个求和就是1,所以剩下来的就是对整张density map求和,所以测试时,还是这么做
(4)考虑背景的影响
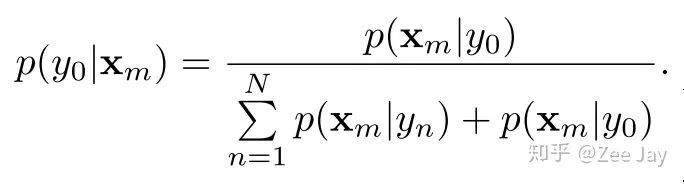
以上的贝叶斯loss只考虑了每个人我希望其存在的概率接近于1,但是没有对背景进行约束,即原图中还存在大量背景呢,本文的做法是,在贝叶斯公式中,不仅考虑N个人,还加上了一个背景的选项,即当作现在又N+1人,多的一个人是背景,用y0表示:
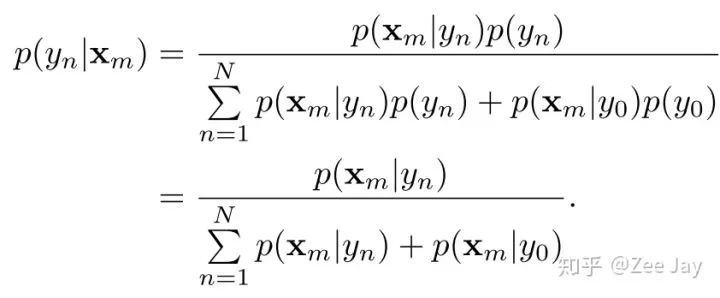
所以后验概率的分母多了背景存在于Xm处的概率,p(Xm|y0), 然后统一p(Xm|yn)和p(Xm|y0)都为1/(N+1),即把背景也当作一个人,那么后验概率如下所示:
同样,类似于之前根据density map去估计第n个人yn存在的概率,我们也去估计背景人y0存在的概率,用期望计算:
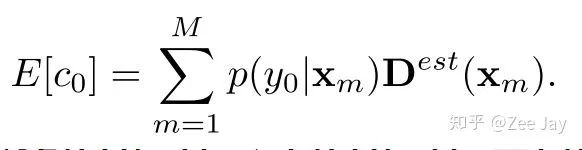
当然由于估计的density map上的每个点表示这里有人的概率,所以一旦Xm处有人,那么Xm处为背景的概率p(y0|Xm)为0,因此上面的期望E[c0]=0. 考虑了背景之后的贝叶斯loss如下所示:

然后背景出现在Xm处的概率,也用2D高斯分布表示,对于某个人yn,这个好办,距离yn越远,则yn出现在这里的概率越小,但是对于背景y0,背景没有一个标注点,那么本文是通过距离最近的标注点越远,就越可能是背景的思想,对y0出现在Xm处的概率建模的,同时提出了一个背景的中心点Z0,如下所示:
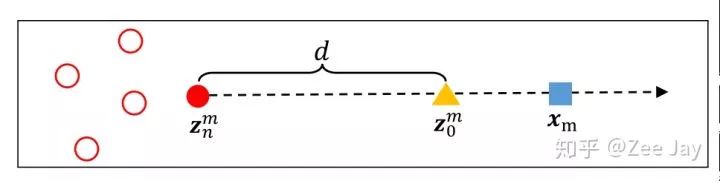
对于Xm这个位置,先找到距离它最近的人头点Zn,然后认为距离Zn的距离为d的点Z0就是一个背景中心点,然后围绕这个假想的背景中心点,用一个2D的高斯分布去建模:
ok,所有的理论推导完了
3.Experiment
(1)本文采用的模型
本文采用VGG16和AlexNet作为backbone,对于VGG19,最后输出1/16尺寸太小,于是他们加了一个上采样,到1/8,再预测density map
(2)可视化后验概率分布
每个人在每个位置,都存在一个后验概率分布p(yn|Xm),然后将N个人的后验概率分布加起来,就得到了整图的后验概率分布了,本文将这个通过计算entropy的方式可视化,
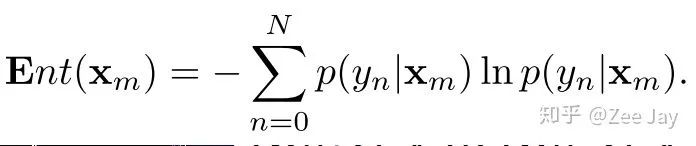
entropy越小,则表示这里要么是人,要么是背景,很明确,如果entropy越大,则表示这里有些模棱两可,
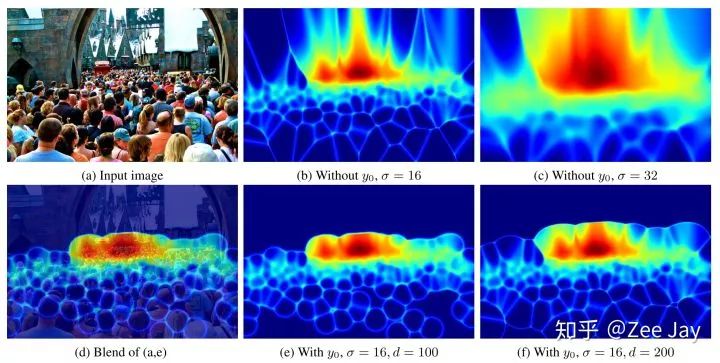
这里越亮越表示模棱两可,越暗表示越明确是人或是背景,然后图中可以看到基本上人头区域都是暗的,人头边界和部分背景比较亮,符合后验概率的计算原理,σ越小图越清晰,因为小的σ不容易导致两个人头区域有重叠,d越小,则表示某个点更容易倍判断为背景,图中的e比f人头轮廓更合理,是因为被判断为背景的点更多
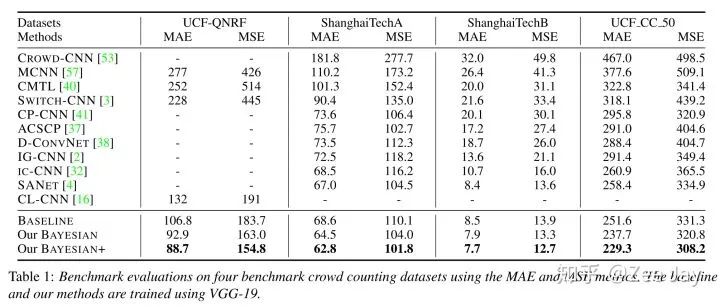
(3)与SOTA的比较
(4)ablation study
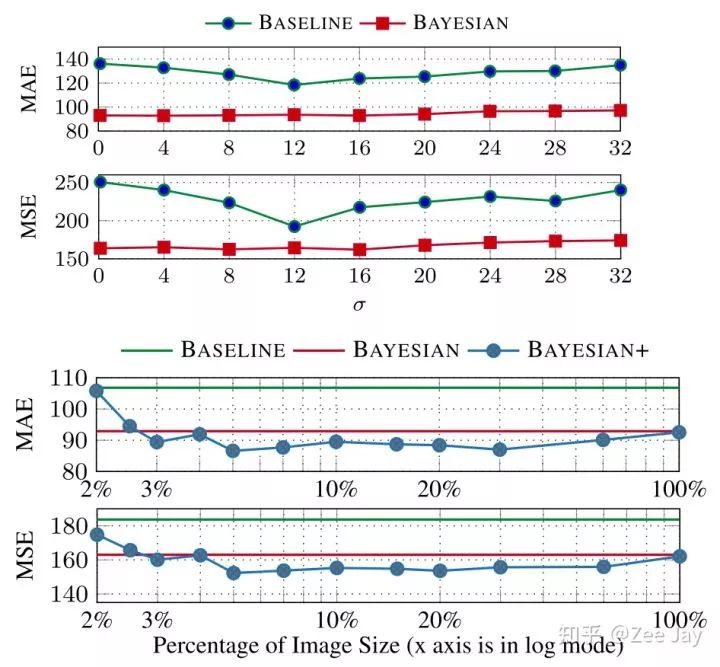
baseline就是用VGG直接训MSE进行训练,Bayesian表示不考虑背景的bayesian loss,Bayesian+表示考虑了背景的loss
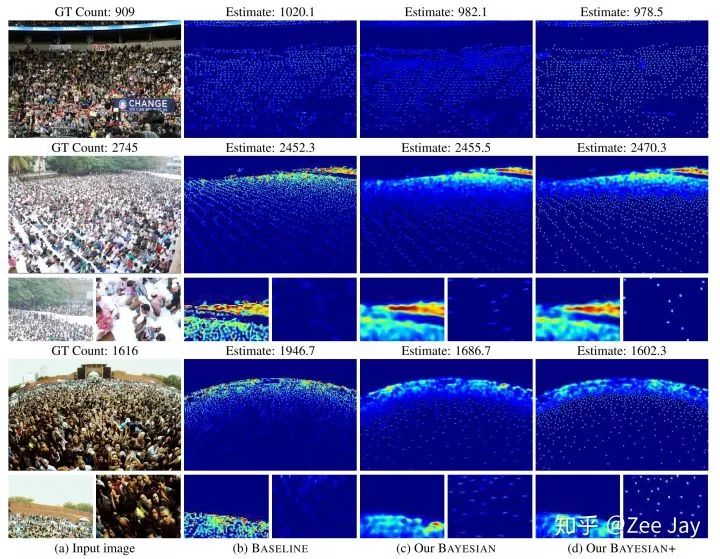
可见对于稀疏的部分,加了bayesian loss,定位地更好,加了背景约束,效果比不加背景好
σ和d的影响:
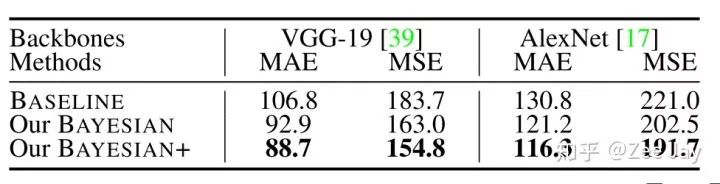
backbone的影响:
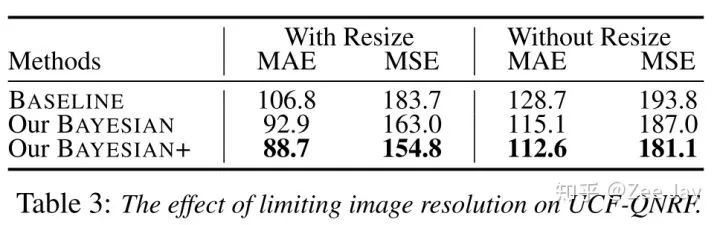
QNRF是否resize的影响:
(5)模型泛化能力
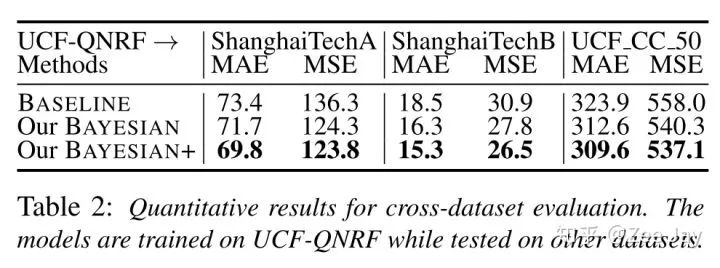
可见在QNRF上训练,在SHA上可以获得不错的泛化能力,但是在SHB和UCF_CC_50上还是一般
4.Comment
本文不愧是Oral的paper,角度很独特,而且数学逻辑非常清晰,虽然看似只是加了一个loss,但是从数学上很合理地证明了其可行性,而且文章确实也写的很好。
重磅!CVer-人群计数交流群已成立
扫码添加CVer助手,可申请加入CVer-目标检测、图像分割、目标跟踪、人脸检测&识别、OCR、姿态估计、超分辨率、SLAM、医疗影像、Re-ID、GAN、NAS、深度估计、自动驾驶、强化学习、车道线检测、模型剪枝&压缩、去噪&去雾&去雨、风格迁移、遥感图像、行为识别、视频理解、图像融合、图像检索等群。一定要备注:研究方向+地点+学校/公司+昵称(如人群计数+上海+上交+卡卡)

▲长按加群

▲长按关注我们
麻烦给我一个在看!