加入极市专业CV交流群,与6000+来自腾讯,华为,百度,北大,清华,中科院等名企名校视觉开发者互动交流!更有机会与李开复老师等大牛群内互动!
同时提供每月大咖直播分享、真实项目需求对接、干货资讯汇总,行业技术交流。关注 极市平台 公众号 ,回复 加群,立刻申请入群~
标题:Robust low-overlap 3-D point cloud registration for outlier rejection
作者:John Stechschulte,Nisar Ahmed,Christoffer Heckman
来源:ICRA 2019
编译:恒夏
审核:Lionheart
【摘要】在配准3D点云时,因传感器在采集数据时位姿的变换而带来不同位姿下物体表面区域被覆盖或漏采集等情况,导致待配准点云间重叠率较小,且配准时通常有一些错误的对应点对, 而这些非对应点可能存在于对应点附近。在本文中,为了剔除这些非对应点对,使用隐马尔科夫随机场模型在迭代最近点算法的框架内对其进行建模。然后采用EM算法用于估计分布参数并学习隐变量成员状态。实验表明,当点云重叠程度较低或中等时,该方法优于其他几种离群值剔除方法。
背景及问题描述
深度感知技术被越来越广泛地应用在机器人学、3-D建模和建图等场景,如将从一个物体表面采集到的多个深度点云组合成一个完整的点云。
通常在没有其他测量工具的辅助下,需要通过点云的配准算法配准后才能使用这些数据。
迭代最近点算法(ICP)就是常用的配准算法之一。
虽然这一算法很经典实用,但是它仍有在低重合度情况下配准失败的缺点。
主要贡献
提出一种利用隐马尔科夫随机场(HMRF)概率模型,通过EM算法来推断哪些点位于重合域中的改进ICP配准算法,以弥补ICP算法在点云重合度较低的情况下配准失败的缺点。
主要原理及思路
Setp1) 在基准点云中找到与待配准点云中每个点最近的点(形成点对);
Step2) 剔除一些外点(非重合域中的点)的点对;
Step3) 通过对应点对组成的两个点集,计算并应用二者的刚性变换,从而最大程度地减少在第1步中搜索的最近点所形成的点对集之间的距离;重复上述步骤直至收敛。(注:原始的ICP算法中并没有包含Step2)文的主要工作针对上述的step2进行。
作者通过将对应点之间的距离建成一个混合模型,这个模型具有两个分布:用于内点的正态分布和针对外点的逻辑分布。利用图像分割技术,通过隐马尔可夫随机场将一个点的内点/外点的状态建成受近邻点的影响模型——邻点先验。通过应用这个邻点先验,隐马尔科夫模型能够推断出在高重叠率或低重叠率时,哪些点不在重叠域中。
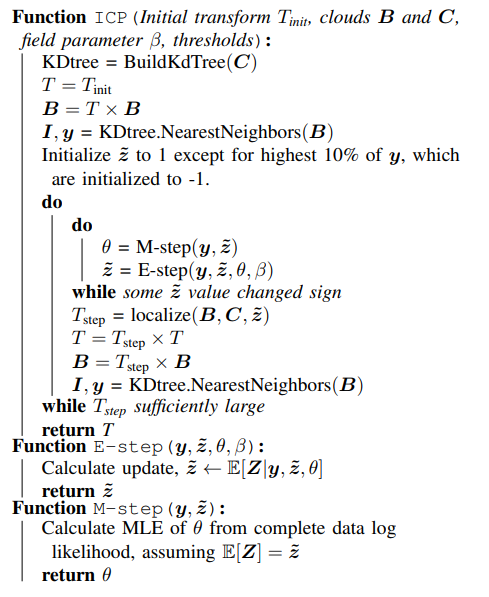
算法1 完整的HMRF ICP算法
上述算法中,B为包含Bi的点集,Bi(Bi∈R4)为在齐次坐标下待配准点云中的一个点,在ICP算法的第一步中,我们从基准点云Ci(Ci∈R4)中找到与Bi最近的点,并把最近点对的距离称为yi=‖Bi - Ci‖为残差,由残差构成的集合成为y。许多源深度数据生成2-D点阵结构(像素网格),其中每个像素都有四个最近邻的点,我们利用这些相邻关系来建立最近点距离Y的模型。
给定一个距离y,我们希望判断哪些点为内点。其判断基于以下两个依据:(1)内点通常比离群点更加靠近各自的最近点;(2)内点的邻点通常更可能是内点,而离群点的邻点也更可能是离群点——邻点先验(信息)。为了获取这一先验信息,通过将Y的分布建模成两种分布的混合模型,正态分布用于内点,逻辑分布用于外点。其中,一个点的混合成员(即不知道是内点还是外点)取决于他们的最近邻点。也就是说,我们在一个点的内点/外点状态上利用隐马尔科夫随机场理论进行表示。
基于隐马尔科夫随机场的网格拓扑结构的数据图模型如图1所示:
图1.待配准点云中的点与基准点云中的点的最近点距离图模型展示了一个在自由深度图中的4 x 4大小的像素网格。在像素i中,Zi∈{+/- 1},其值分别代表没有观测到的内点/外点的状态,Yi∈R >= 0为最近点对之间的观测距离。
最后,作者使用EM算法估计最大似然模型参数和隐状态Z,类似于论文[1、2]中的图像分割模型。在E-step中,通过正态分布参数和逻辑参数的当前估计,以及当前的均值域和观测到的残差,来估计隐马尔科夫随机场的期望值。然后,在M-step中,利用观测数据的最大似然估计和隐马尔科夫随机场的期望值更新正态分布参数和逻辑参数的估计。
实验结果
实验场景一:
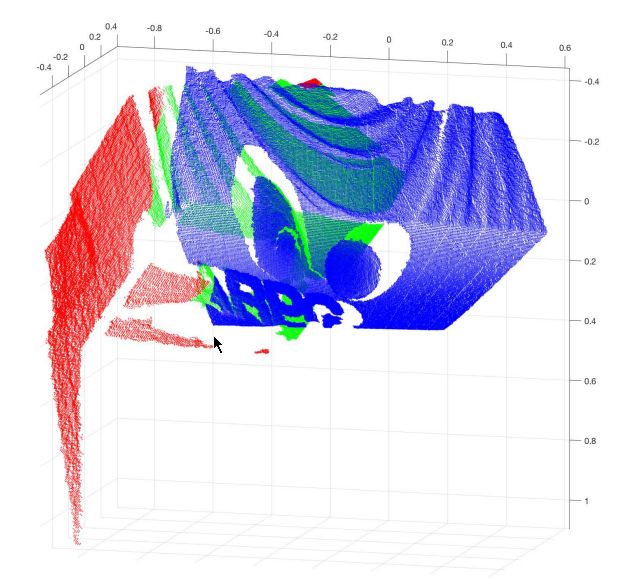
如图2所示,成功配准的点云之间只有36%的重叠率。蓝色的点是基准点云,绿色和红色代表待配准点云。根据HMRF方法推断,绿色的点是内点,红色的点是外点。
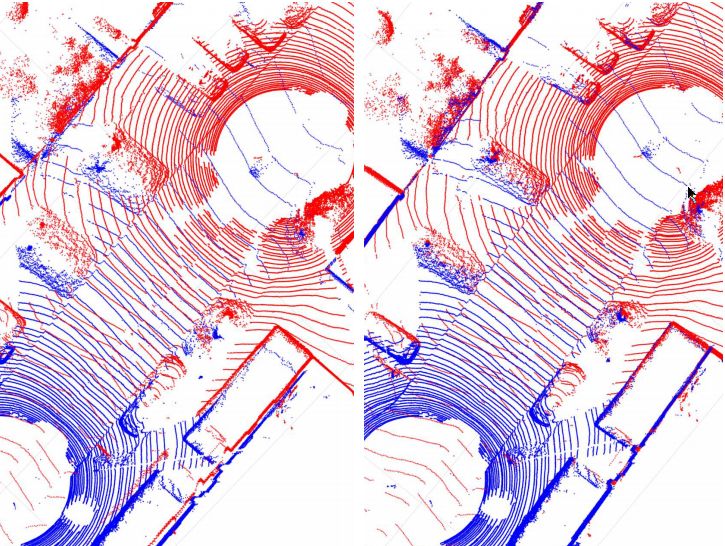
图3. 成功配准的两个激光雷达图,该数据来自KITTI里程计数据集。左边是在有RTK-GPS数据下的的初始位姿。右侧是通过HMRF改进的ICP算法配准结果,而且是没有使用数据拓扑的信息(即RTK-GPS数据)。
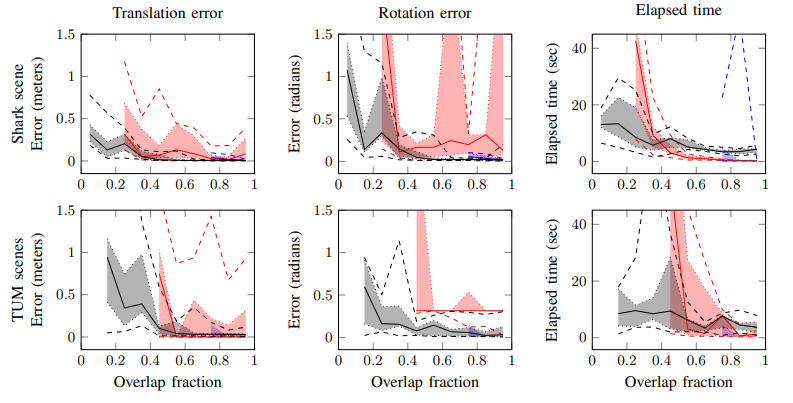
实验场景三:
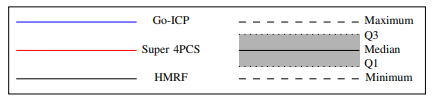
作者通过Go-ICP、Super 4PCS 两种算法与利用HMRF改进的ICP算法(本文算法)进行了性能的对比,总的来说,不管是平移还是旋转错误率还是算法所消耗的时间,HMRF ICP优于另两种算法,其对比图如下:
结论与总结
上述工作证明,利用HMRF ICP配准算法进行3-D扫描仪数据建模型时,即使在较少的扫描帧,或者以较低的帧速率配准条件下,仍然具有精准的配准效果。
译文涉及文献
[1]Besag J . On the Statistical-Analysis of Dirty Pictures[J]. Journal of the Royal Statistical Society. Series B: Methodological, 1986, B-48(5-6):259-302.
[2] Celeux G , Forbes F , Peyrard N . EM procedures using mean field-like approximations for Markov model-based image segmentation[J]. Pattern Recognition, 2003, 36(1):131-144.
When registering 3-D point clouds it is expectedthat some points in one cloud do not have correspondingpoints in the other cloud. These non-correspondences are likelyto occur near one another, as surface regions visible fromone sensor pose are obscured or out of frame for another.In this work, a hidden Markov random field model is usedto capture this prior within the framework of the iterativeclosest point algorithm. The EM algorithm is used to estimatethe distribution parameters and learn the hidden componentmemberships. Experiments are presented demonstrating thatthis method outperforms several other outlier rejection methodswhen the point clouds have low or moderate overlap.
-End-
CV细分方向交流群
添加极市小助手微信(ID : cv-mart),备注:研究方向-姓名-学校/公司-城市(如:目标检测-小极-北大-深圳),即可申请加入目标检测、目标跟踪、人脸、工业检测、医学影像、三维&SLAM、图像分割、OCR、姿态估计等极市技术交流群(已经添加小助手的好友直接私信),更有每月大咖直播分享、真实项目需求对接、干货资讯汇总,行业技术交流,一起来让思想之光照的更远吧~
![]()
△长按添加极市小助手
![]()
△长按关注极市平台
觉得有用麻烦给个在看啦~ ![]()