从R-CNN到Mask R-CNN
点击上方“CVer”,选择加"星标"或“置顶”
重磅干货,第一时间送达

作者:taigw
https://zhuanlan.zhihu.com/p/30967656
自从2012年的ILSVRC竞赛中基于CNN的方法一鸣惊人之后,CNN已成为图像分类、检测和分割的神器。其中在图像检测的任务中,R-CNN系列是一套经典的方法,从最初的R-CNN到后来的Fast R-CNN, Faster R-CNN 和今年的Mask R-CNN, 我们可以看到CNN在图像检测中是如何一点一点提高的。本文一道回顾R-CNN家族的发展史,了解这些方法的演变和这个演变过程中的那些富有创意的想法。
R-CNN 系列的四篇文章如下:
R-CNN: arxiv.org/abs/1311.2524
Fast R-CNN: arxiv.org/abs/1504.0808
Faster R-CNN: arxiv.org/abs/1506.0149
Mask R-CNN: arxiv.org/abs/1703.0687
图像的检测任务是从一个复杂场景的图像中找到不同的物体,并且给出各个物体的边界框。图像检测的三个著名的数据集是PASCAL VOC,ImageNet和微软COCO. PASCAL VOC包含20个物体的类别,而ImageNet包含一千多种物体类别,COCO有80中物体类别和150万个物体实例。

1 R-CNN
R-CNN的思路是很直观的三步曲:1,得到若干候选区域;2, 对每个候选区域分别用CNN分类;3,对每个候选区域分别进行边框预测。
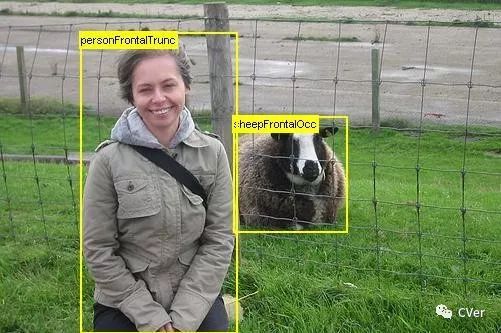
在R-CNN出现之前,目标检测的流行思路是先从图像中得到一些候选区域,再从候选区域中提取一些特征,然后利用一个分类器对这些特征进行分类。分类的结果和候选区域的边界框就可以作为目标检测的输出。一种得到候选区域的方法是Selective Search, 该方法可以得到不同尺度的候选区域,每个候选区域是一个联通的区域。如下图中,左边得到的是较小的候选区域,右边是较大的候选区域,在该尺度下包含了整个人的区域。

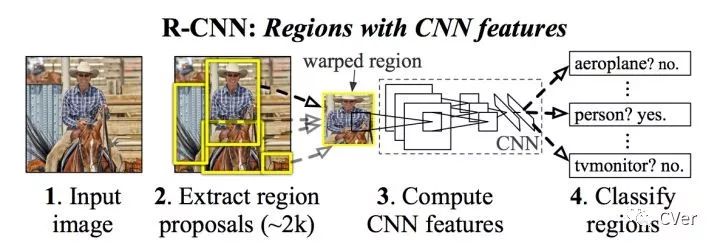
R-CNN的想法是,既然CNN在图像分类任务中的表现很好,可以自动学习特征,何不用它来对每个候选区域进行特征提取呢?于是R-CNN在Selective Search得到的候选区域的基础上,将每个候选区域缩放到一个固定的大小,并且作为AlexNet(ImageNet 2012图像分类竞赛的冠军)的输入,依次对这些区域进行特征提取,然后再使用支持向量机对各个区域的特征分别进行分类。R-CNN的过程如下:
这样就能得到一个检测的结果了。但是Slelective Search得到的候选区域并不一定和目标物体的真实边界相吻合,因此R-CNN提出对物体的边界框做进一步的调整,使用一个线性回归器来预测一个候选区域中物体的真实边界。该回归器的输入就是候选区域的特征,而输出是边界框的坐标。
R-CNN的效果很不错,比VOC 2012的最好的结果提高了30%的准确度。但是问题就是太慢,主要有三方面原因:1,候选区域的生成是一个耗时的过程;2,对候选区域特征提取需要在单张图像上使用AlexNet 2000多次; 3, 特征提取、图像分类、边框回归是三个独立的步骤,要分别进行训练,测试过程中的效率也较低。
2 Fast R-CNN
为了解决R-CNN中效率低的问题,Fast R-CNN想,一张图像上要使用AlexNet 2000多次来分别得到各个区域的特征,但很多区域都是重合的,可否避免这些重复计算,只在一张图像上使用一次AlexNet,然后再得到不同区域的特征呢?
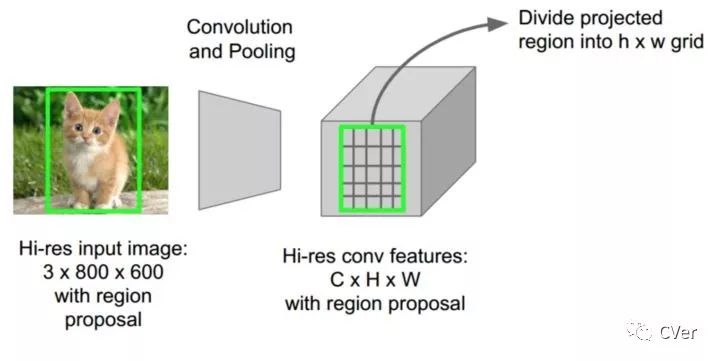
于是Fast R-CNN提出了一个ROI Pooling的方法,先对输入图像使用一次CNN前向计算,得到整个图像的特征图,再在这个特征图中分别取提取各个候选区域的特征。由于候选区域的大小不一样,而对应的特征需要要具有固定的大小,因此该方法对各个候选区域分别使用POI Pooling, 其做法是:假设第 i 个候选区域ROI的大小 hi x wi, 要使输出的大小 h x w,那么就将该ROI分成 h x w 个格子,每一个格子的大小 (hi/h) x (wi/w), 然后对每一格子使用max-pooling得到大小 h x w 的特征图像。
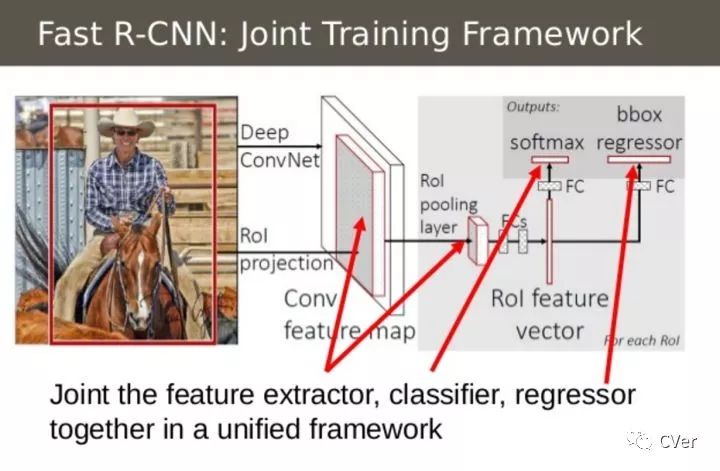
Fast R-CNN的第二点创意是把之前独立的三个步骤(特征提取、分类和回归)放到一个统一的网络结构中。该网络结构同时预测一个候选区域的物体类别和该物体的边界框,使用两个全连接的输出层分别进行类别预测和边框预测(如下图所示),将这两个任务进行同时训练,利用一个联合代价函数:

公式中的两项分别是 classification loss 和 regression loss。
使用VGG16作为特征提取网络,Fast R-CNN在测试图像上的处理时间比R-CNN快了200多倍,并且精度更高。如果不考虑生成候选区域的时间,可以达到实时检测。生成候选区域的Selective Search算法处理一张图像大概需要2s的时间,因此成为该方法的一个瓶颈。
3 Faster R-CNN
上面两种方法都依赖于Selective Search生成候选区域,十分耗时。考虑到CNN如此强大,Faster R-CNN提出使用CNN来得到候选区域。假设有两个卷积神经网络,一个是区域生成网络,得到图像中的各个候选区域,另一个是候选区域的分类和边框回归网路。这两个网络的前几层都要计算卷积,如果让它们在这几层共享参数,只是在末尾的几层分别实现各自的特定的目标任务,那么对一幅图像只需用这几个共享的卷积层进行一次前向卷积计算,就能同时得到候选区域和各候选区域的类别及边框。
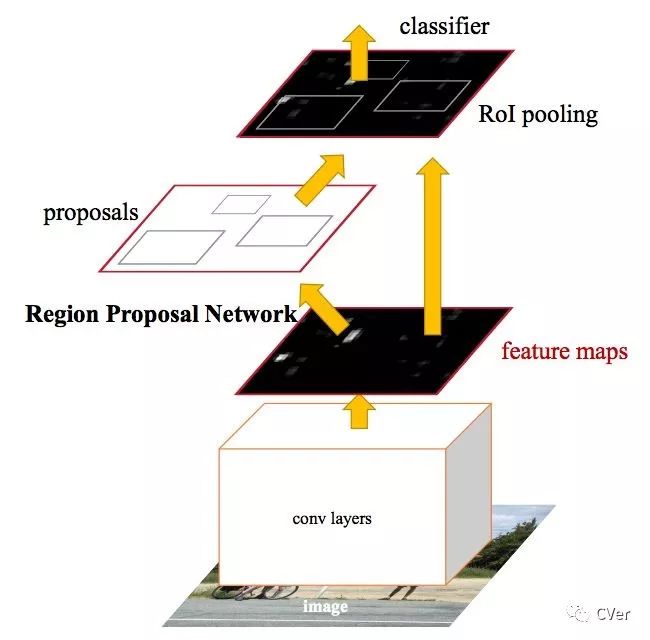
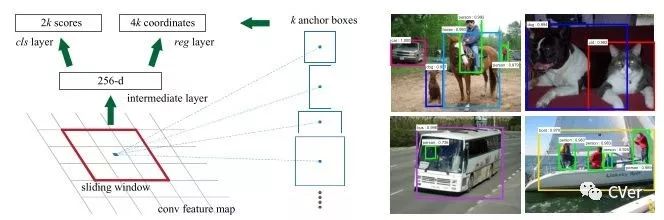
候选区域生成网络(Region Proposal Network, RPN)如下,先通过对输入图像的数层卷积得到一个特征图像,然后在特征图像上生成候选区域。它使用一个 n x n(n=3)的滑动窗口,将局部的特征图像转换成一个低维特征, 预测 k 个的区域(cls层,2k 个输出)是否为候选区域和对应的 k 个边框(reg层,4k 个输出)。这里的 k 个区域被称为锚(anchor), 对应着与滑动窗口具有相同的中心的不同大小和不同长宽比的矩形框。假设卷积后的特征图像大小为 W x H ,那么一共 W x H x k 个锚。这种特征提取和候选区域生成的方法具有位移不变性。
使用RPN得到候选区域后,对候选区域的分类和边框回归仍然使用Fast R-CNN。这两个网络使用共同的卷积层。 由于Fast R-CNN的训练过程中需要使用固定的候选区域生成方法,不能同时对RPN和Fast R-CNN使用反向传播算法进行训练。该文章使用了四个步骤完成训练过程:1,单独训练RPN;2,使用步骤中1得到的区域生成方法单独训练Fast R-CNN; 3, 使用步骤2得到的网络作为初始网络训练RPN;4, 再次训练Fast R-CNN, 微调参数。
Faster R-CNN的精度和Fast R-CNN差不多,但是训练时间和测试时间都缩短了10倍。
4 Mask R-CNN
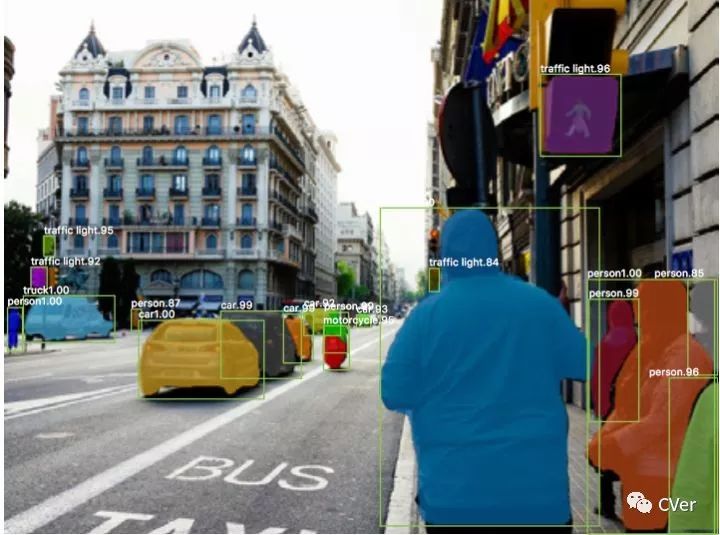
Faster R-CNN 在物体检测中已达到非常好的性能,Mask R-CNN在此基础上更进一步:得到像素级别的检测结果。 对每一个目标物体,不仅给出其边界框,并且对边界框内的各个像素是否属于该物体进行标记。
Mask R-CNN利用Faster R-CNN中已有的网络结构,再添加了一个头部分支,使用FCN对每个区域做二值分割。
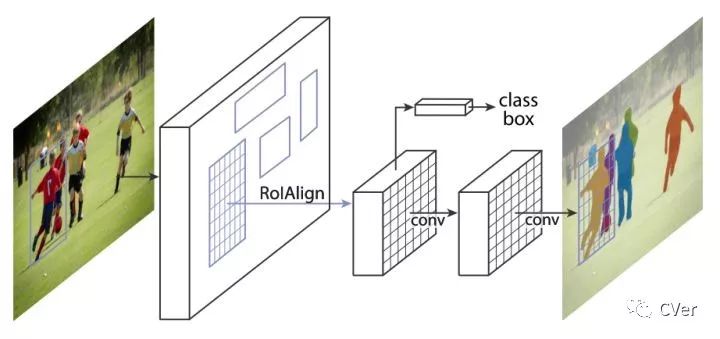
Mask R-CNN还提出了两个小的改进使分割的结果更好。第一,对各个区域分割时,解除不同类之间的耦合。假设有K类物体,一般的分割方法直接预测一个有K个通道的输出,其中每个通道代表对应的类别。而Mask R-CNN预测K个有2个通道(前景和背景)的输出,这样各个类别的预测是独立的。第二,Faster R-CNN中使用ROI Pooling之前的取整操作使特征图中所使用的ROI与原图中ROI的位置不完全对应。在Fast和Faster R-CNN中,在使用ROI Pooling之前的特征图大小是原图的1/16。假设一个ROI在原图中的横坐标范围是w0 到w1 ,纵坐标范围是h0 到 h1 ,那么在特征图中该ROI的横坐范围是w0/16 到 w1/16 , 纵坐标范围是h0/16 到h1/16 , 取整得到[w0/16] ,[w1/16] , [h0/16] 和 [h1/16] 。这样会导致Pooling前的特征图中的ROI与原图中的ROI没有完全对齐。这不会对分类和边框回归造成大的影响,但是会影响分割的结果,因为没有保持空间对应关系。Faster R-CNN 不取整,使用双线性插值得到 与原图中ROI对应的特征图中的区域,保留坐标的对应关系,该方法称作 ROIAlign .
CVer目标检测交流群
扫码添加CVer助手,可申请加入CVer-目标检测交流群。一定要备注:目标检测+地点+学校/公司+昵称(如目标检测+上海+上交+卡卡)

▲长按加群
这么硬的论文速递,麻烦给我一个好看

▲长按关注我们
麻烦给我一个好看!



