厚势解读采埃孚自动驾驶之路——覆盖五大场景的系统级供应商|厚势

厚势按:采埃孚发布其 ADAS/AD 产品策略,厚势为您带来专业解读。
采埃孚公司负责汽车电控系统安全的产品总监 Farid Khairallah 发表了一篇名为「采埃孚的自动驾驶之路——如何引导一辆处于移动中的汽车?」的演讲。他在演讲中将采埃孚的 ADAS/AD 产品和策略概括为三步走——「观察( See )—思考(Think)—行动( Act )」,并对当前的市场进行了分析,还详细介绍了采埃孚自动驾驶的全线产品。以下是厚势为您带来的解读。
市场分析及基本策略
<< 左右滑动查看原文PPT (1-3) >>
厚势解读
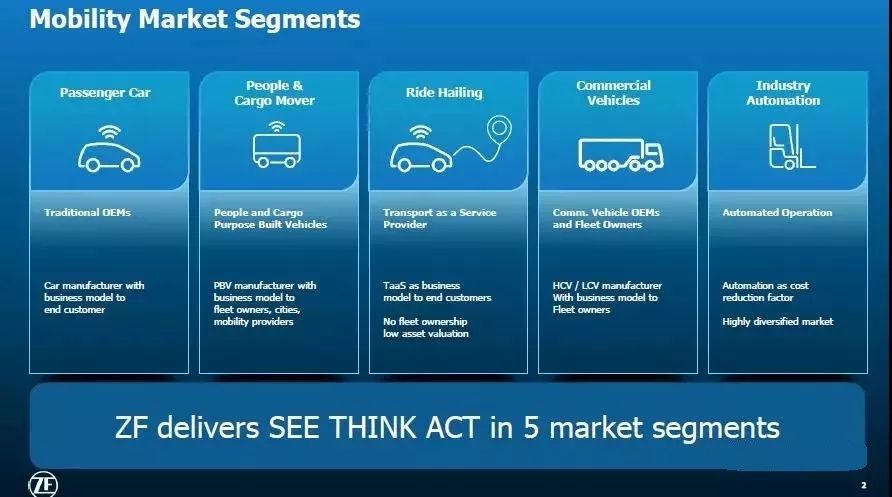
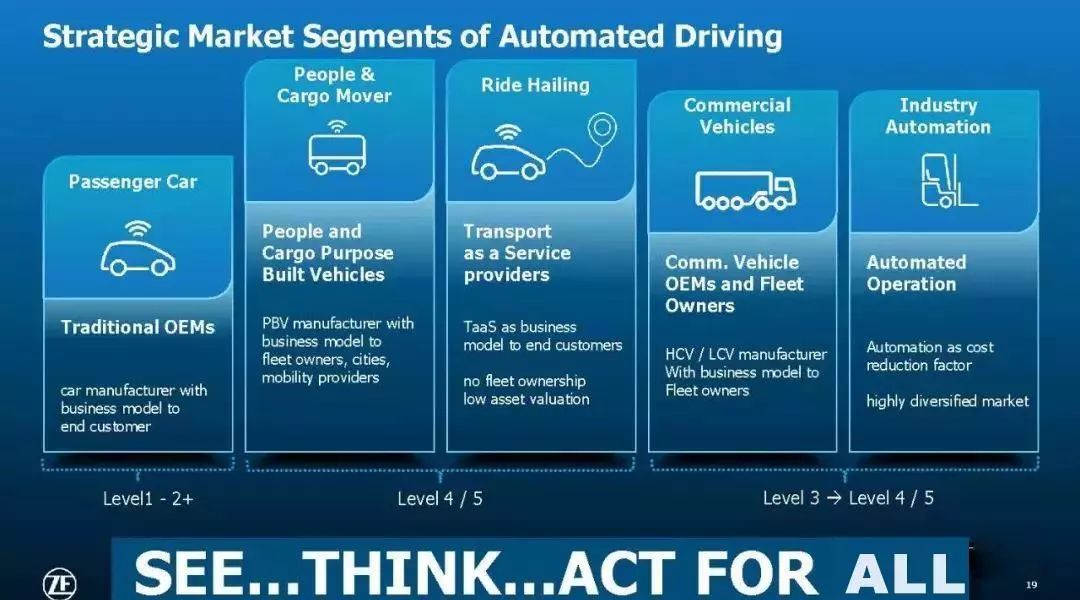
制造产品的目标是为了销售,而对市场需求的准确把握无疑是产品能卖得出去的重要前提之一。采埃孚将当前 ADAS 和自动驾驶技术的应用场景分成了五大主要市场版块:
乘用车:传统车企,卖给普通用户;
公共交通及送货服务:城市公共管理,快递公司等;
共享出行行业:出行服务提供商(如 Uber,滴滴出行等);
商用车:传统车企,生产轻型卡车/重型卡车等,卖给运输车队;
工业自动化:特殊领域的自动化,如农业机械和建筑机械的自动驾驶。
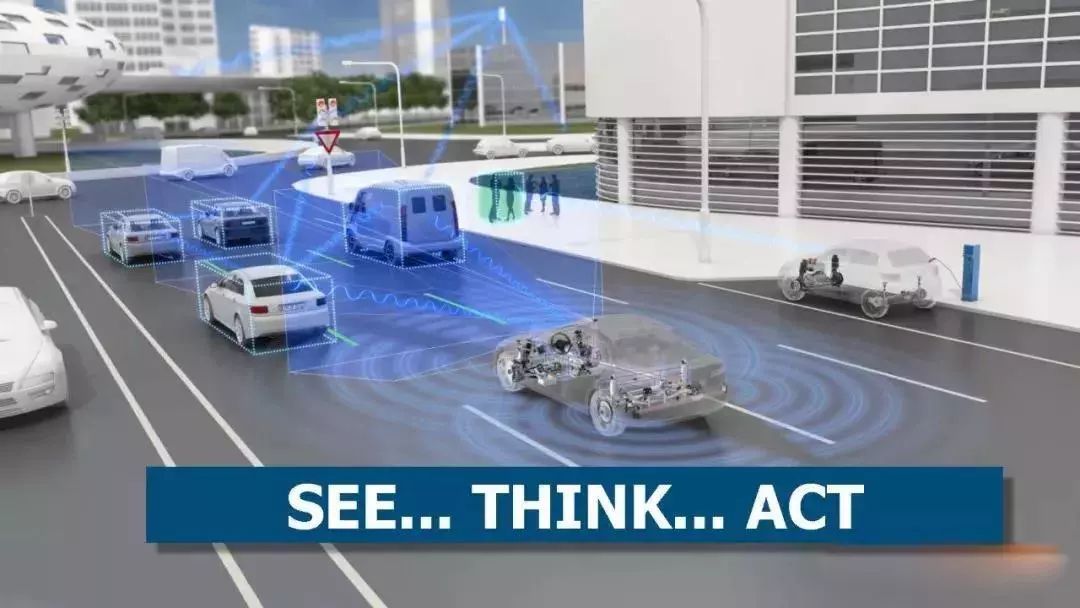
采埃孚不仅对市场进行了细分,对自动驾驶技术的本质把握也是相当到位,他们提出的基本策略是:「 SEE…THINK…ACT 」。这个策略果然很「人工智能」,完全就是希望汽车模拟人类啊——首先让自动驾驶的汽车像人一样「观察」和感知周围环境(四周的车辆和行人,信号灯,所处的车道位置、其他交通信息等);然后让汽车像人的大脑一样处理并综合「思考」这些信息,进而做出安全的行为决策,最后展开「行动」,就像 Farid Khairallah 在 PPT 标题中提到的那样,自动驾驶技术要引导一辆行进中的无人驾驶汽车安全到达目的地。
在讲了基本策略后,Farid 接下来展开介绍了 ADAS 和自动驾驶为什么变得越来越重要,都有哪些驱动力?
ADAS 和自动驾驶( AD )很重要


<< 左右滑动查看原文PPT(4-8)>>
厚势解读
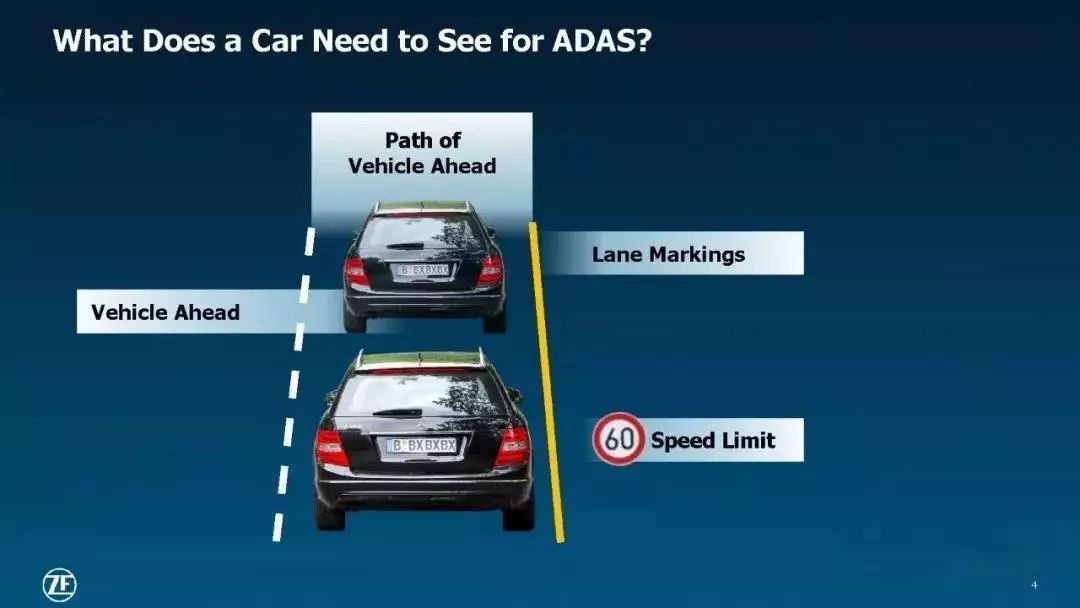
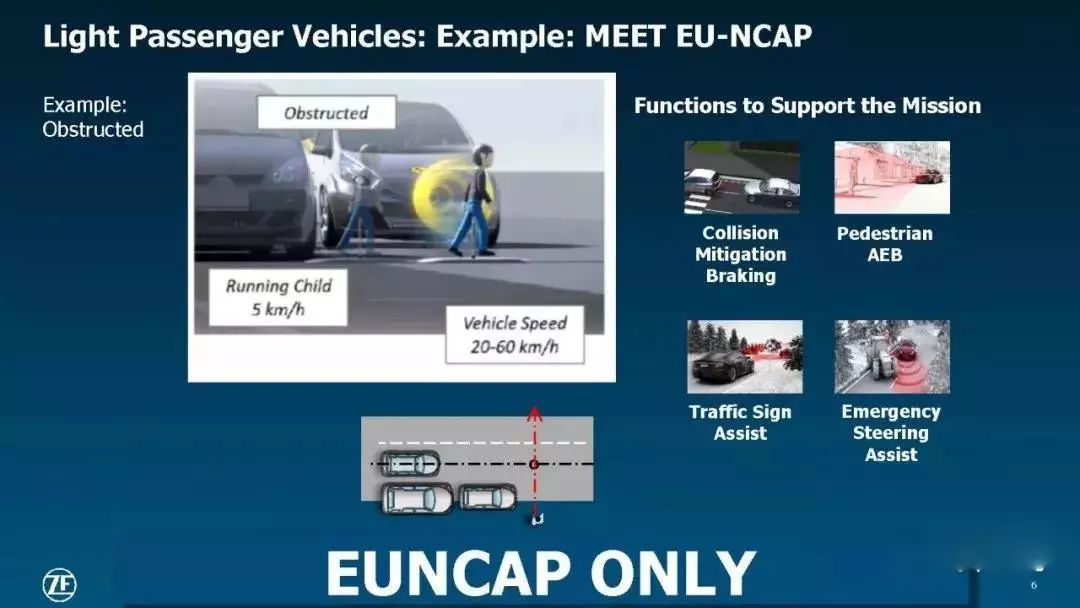
承接第一部分的基本策略,作者首先(第 4,5 页 PPT )简要分析了一辆具备 ADAS/AD 功能的汽车怎样才算正确地「观察」到了周围的环境,他认为至少这几个能力必须具备:分辨车道线,识别限速标志,感知前方车辆和它的前进轨迹等。接下来,作者举了「乘用车」和「商用车」两个领域的案例,说明 ADAS/AD 技术不仅在行业内受到愈来愈多的重视,政府和监管部门也希望助力其发展。
乘用车方面,欧盟新车评鉴协会( EUNCAP )对那些具备「安全辅助」功能的汽车评级会更高,认为具备 ADAS 功能的汽车更加安全。作者(第 6 页)提到,如果汽车要满足 EUNCAP 的高评级要求,最好具备 ADAS 功能,包括防撞自动制动( Collision Mitigation Braking )、遇行人自动紧急制动( Pedestrian AEB )、道路交通标志辅助( Traffic Sign Assist )和紧急转向辅助( Emergency Steering Assist )等功能。只要厂商希望自己的产品通过 EUNCAP 的五星安全评级,那么 ADAS 功能几乎就是标配了。
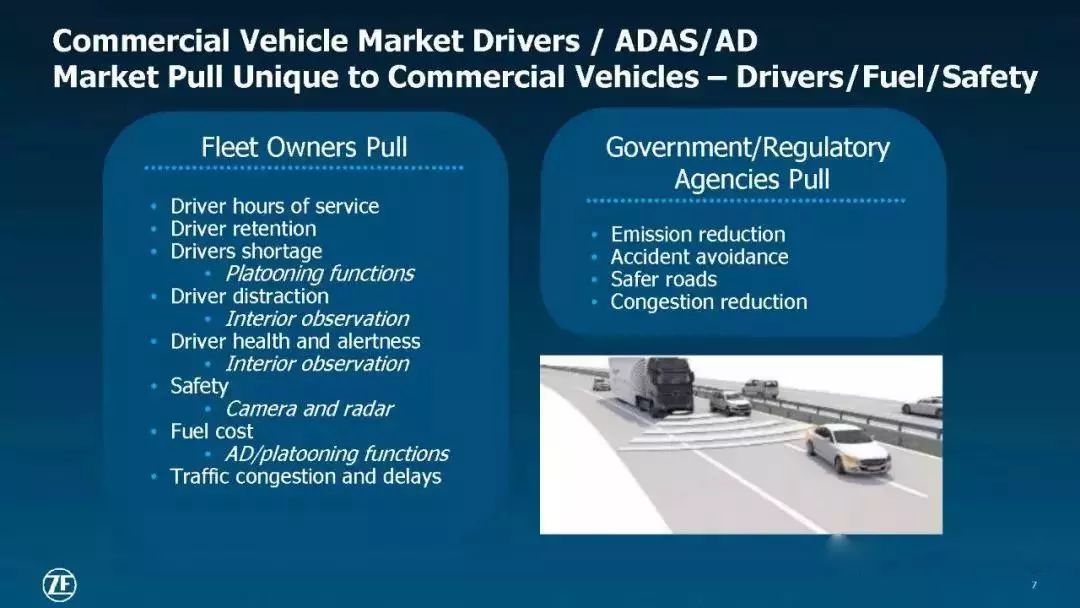
商用车方面, ADAS 及自驾技术的推动力来自市场和政府两个层面(第7页)。对市场来说,运输公司的管理者其实忧心忡忡,担心的事情方方面面:司机数量短缺,工作时间长,留不住人,人员流失更导致排班出车成难题;而司机们长途运输容易疲劳,没有车内监控和提醒手段,安全驾驶隐患大;燃油车运输费用不菲;而拥挤的交通也经常导致运输任务延迟。政府和监管层更是希望利用 ADAS 和自驾技术减少碳排放,降低道路交通事故发生率,同时缓解愈来愈严重的交通拥挤。
当然,在其他特定应用领域(如农业机械,建筑机械),自动驾驶技术也能协助降低成本,有广泛的应用前景(第 8 页)。
谈完了自动驾驶的重要性,自然而然的需要讲讲该如何实现吧?这正是后续内容涉及的方面,让我们先看看采埃孚的自动驾驶基础架构吧。
自动驾驶技术基础架构
<<左右滑动查看原文PPT(9-10) >>
厚势解读
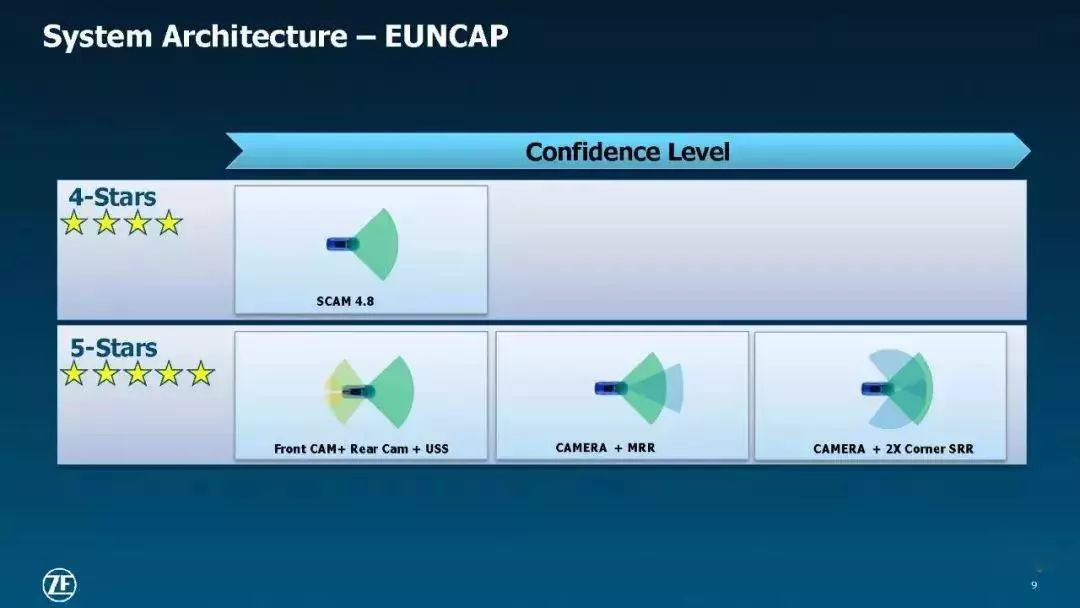
采埃孚首先引用了 EUNCAP 对新车的评级标准(第 9 页),可以看出只靠一个摄像头(采埃孚 SCAM4.8 前视摄像头)安全等级最多也就到 4 星;而配置了多种组合传感器的车型安全测评等级则可能达到最高的五星,这些配置组合包括前视摄像头+后视摄像头+超声波雷达( Front CAM+Rear CAM+USS )、摄像头+中距毫米波雷达( Camera+MRR )、摄像头 +2 个侧面短距毫米波雷达( Camera+2* Corner SRR )。
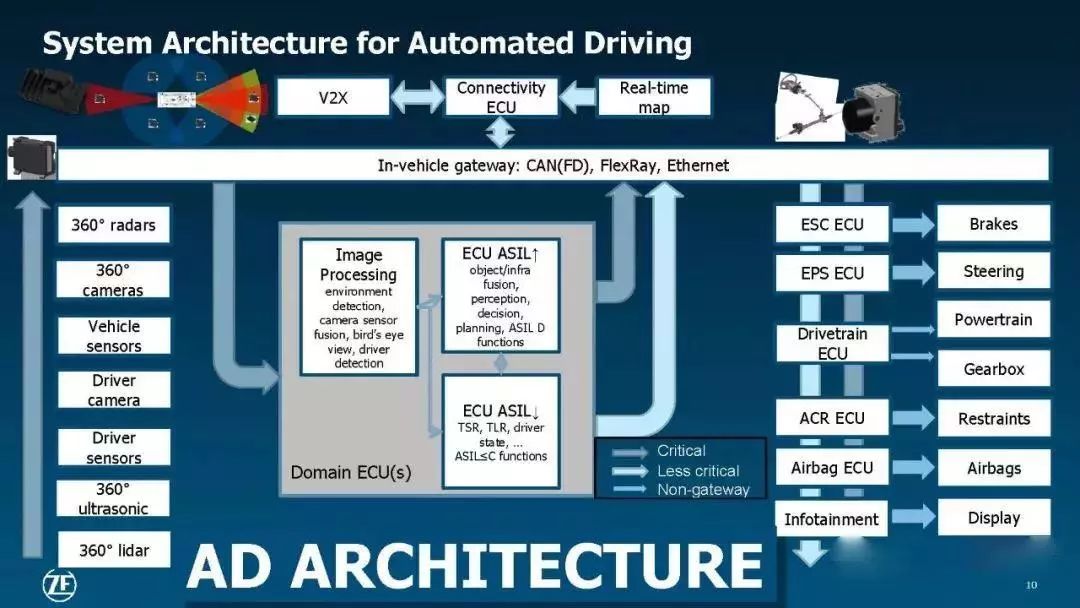
随后采埃孚根据目前主流的自动驾驶技术方案,刻画了一张清晰的自驾技术基础架构图(详见第 10 页),简要来说,就是各类外部信息通过网关汇入自驾车的「大脑」内,汽车大脑内的电控单元( ECU )负责处理和融合信息,作出决策,驱动控制器完成实际驾驶行为。其中外部数据不仅包括车联网数据和实时地图信息,还包括各类传感器(毫米波雷达、 360 度摄像头、驾驶员监控摄像头、接触传感器、激光雷达等)获取的周围环境信息,这些图像信息经 ECU 处理后可以实现对各类对象的识别与感知,帮助汽车「观察」四周的实际情况,做出驾驶决策和规划(刹车、转向、动力传送和变速、展示行车信息等),并在紧急情况下启动辅助应急措施(主动拉紧安全带、自动启动安全气囊等)。
谈完了抽象的架构,第 4 部分才是本文的重点,Farid Khairallah 可是产品总监啊,前面做了这么多铺垫,当然得隆重推出自家的产品。
采埃孚自动驾驶系产品线


<< 左右滑动查看原文PPT(11-17) >>
厚势解读
看了第 11 页 PPT ,采埃孚这是希望在自驾系统领域通吃的节奏啊,传感器(摄像头、毫米波雷达、激光雷达)、执行器( EPS、E-Driver 变速箱、主动式后轮转向系统 AKC 、减震器、嵌入式刹车控制单元),汽车大脑( ZF ProAI 超级汽车大脑)一应俱全。
采埃孚在传感器领域产品覆盖很广(第 12 页):前视摄像头包括 S-Cam4 系列和 TriCam 系列,还配有远射镜头;除此之外采埃孚也提供车内监控摄像系统。毫米波雷达囊括了近程、中程、远程以满足各类市场需求;对高端客户,公司还准备了固态激光雷达。
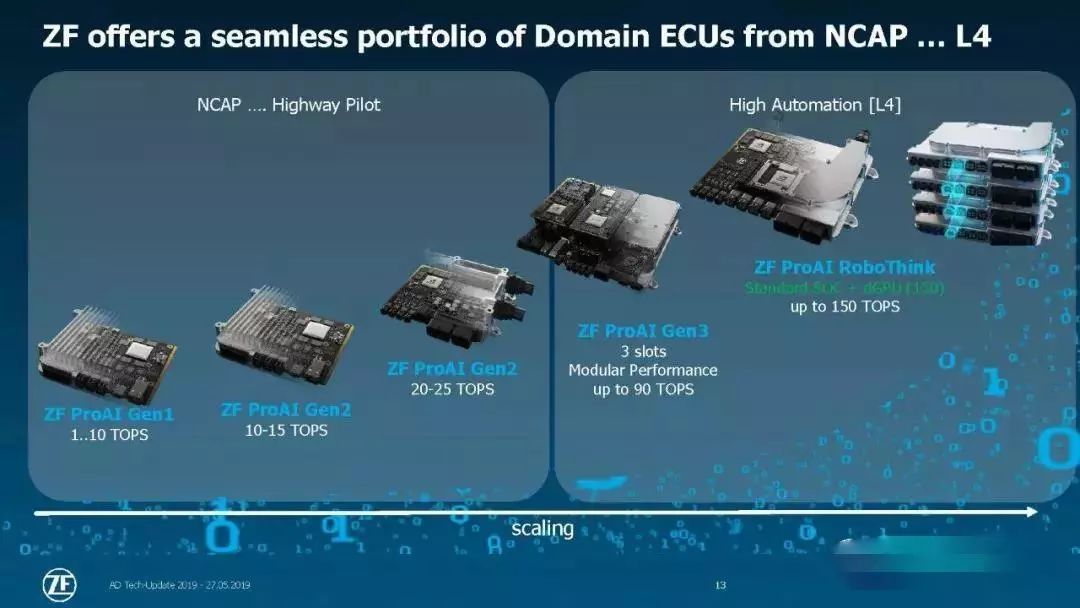
采埃孚研发的汽车大脑——「 ZF ProAI 」历经三代优化,其最新一代「 ZF ProAI Robo Think 」已满足 L4 级自动驾驶要求,是一款标准的系统级芯片( SOC ),采用可扩展和模块化的设计,运算能力也由第一代最高 10TOPS(每秒完成 10 万亿运算操作),升级到现在单芯片最高处理能力 150TOPS 。(详见第 13 页)
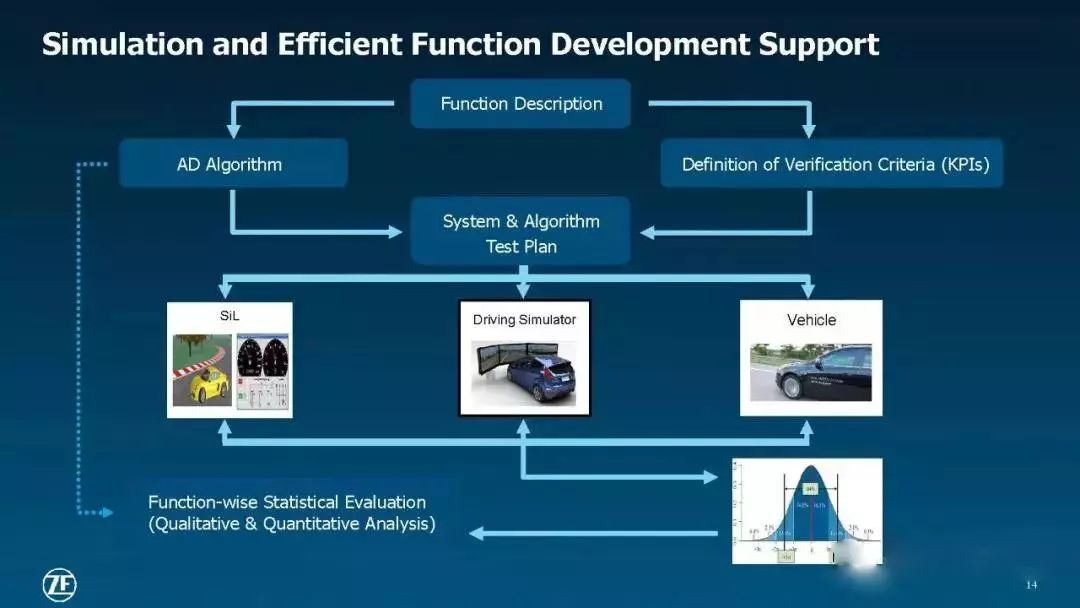
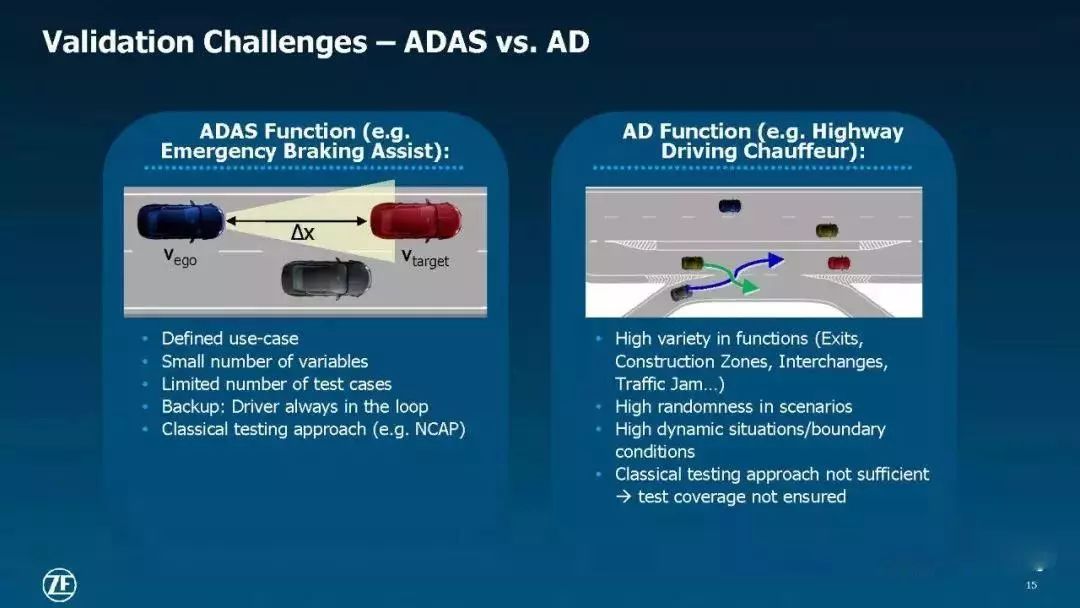
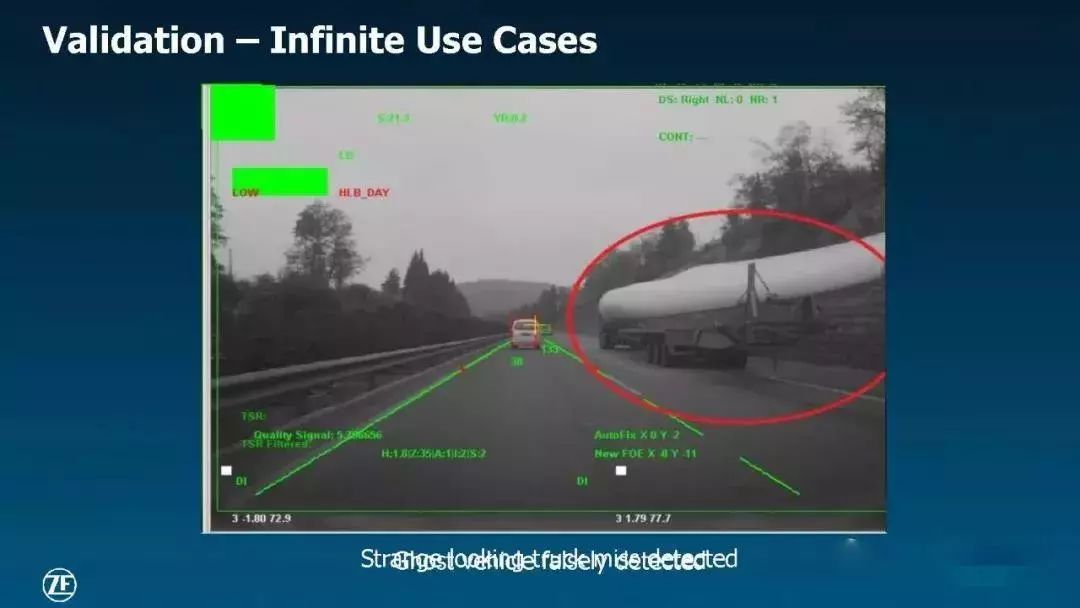
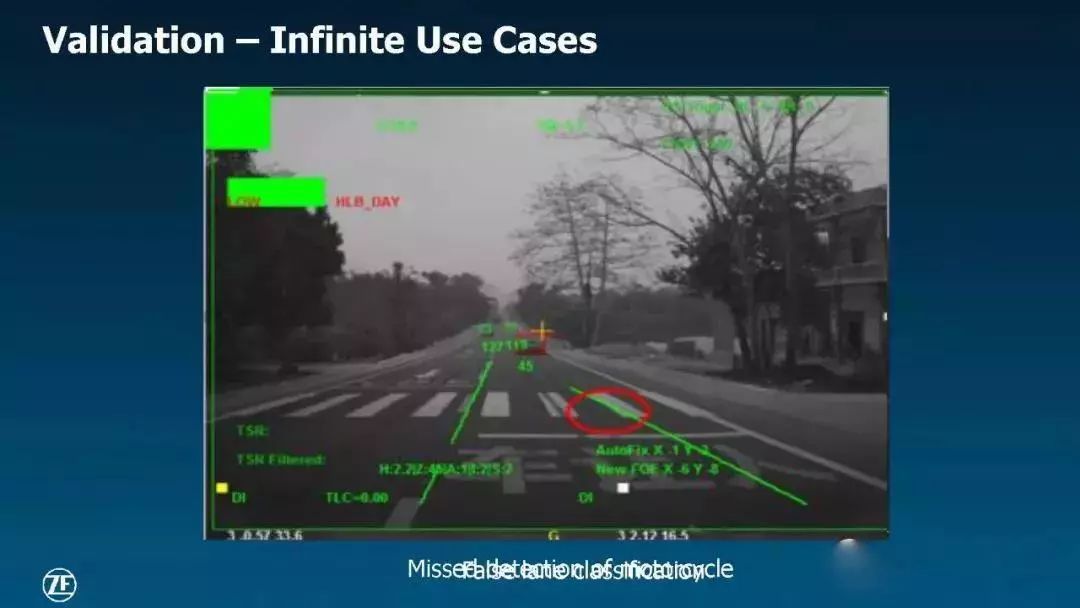
除了提供自驾技术需要的关键零部件外,采埃孚还提供仿真模拟系统,协助客户完成自动驾驶技术方案的测试和算法验证(第 14 页),客户可以专注于研发核心算法、定义 KPI 指标和测试方案,在方案实际部署到试验车上以前,先在采埃孚的模拟环境中测试,得到定量和定性的统计分析,协助优化程序方案,节省客户的时间和精力。第 15 页作者还对比了 ADAS 和 AD(自动驾驶)在算法验证上的天差地别,以高速上的自动驾驶为例,需要自驾车应对各种复杂情况——出口、临时维修区域、合流汇入、拥堵等等,场景的出现是动态随机的,边界也是动态变化的,经典的测试方式完全不够用,如何保证测试案例的全覆盖也是难题,这更进一步说明利用模拟仿真环境多轮测试迭代优化算法是十分必要。
采埃孚的未来愿景


<< 左右滑动查看原文PPT(18-20) >>
厚势解读
最后 Farid Khairallah 再次强调了采埃孚的未来愿景——成为「汽车业核心技术的系统级供应商」,成为影响和塑造下一代移动出行的技术专家。同时他还呼应了 PPT 开头提到的五大自驾技术细分市场,并粗略给出了目前这些细分市场大致所处的自动驾驶级别,不得不感慨,那些有着特定用途和目标的汽车,可能更容易实现自动驾驶,不知道在中国这样一个网购发达、快递爆发的时代,最快使用自动驾驶技术的汽车会不会是在高速上奔流不息的大货车,或者收发快递的小型物流车呢?
编辑:saladir
来源:ZF
入群:加微信号 autoHS,入厚势汽车科技群与行业专家讨论更多自动驾驶和新能源汽车行业信息
-END-

精选文章
厚
势
汽
车
为您对接资本和产业
新能源汽车 自动驾驶 车联网
联系微信:autoHS
或 183 0185 8119

点击阅读原文,查看文章「恒大新能源汽车全球研究总院招聘信息」





