【泡泡一分钟】基于模型分割和实时环境重构的的虚拟现实远程操作
每天一分钟,带你读遍机器人顶级会议文章
标题:Towards a Real-Time Environment Reconstruction for VR-Based Teleoperation Through Model Segmentation
作者:Sebastian Kohn, Andreas Blank, David Puljiz, Lothar Zenkel, Oswald Bieber, Bjorn Hein and Jorg Franke
来源:2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)
编译:张建
审核:颜青松,陈世浪
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权

摘要

在接下来的几年里,越来越多的自主移动机器人系统将进入现代车间。但是,在系统死锁、算法故障或不可用等意外情况下,有必要提供可干预的人机界面。
利用虚拟或混合现实技术,多模型遥控操作为制造合适的人机界面提供了潜力。这一领域的主要挑战包括:实时远程控制、使用多个传感器的实时、高效和整体的环境检测、传感器数据的降噪可视化以及目标识别能力。
本文总结了一种具有近实时性、互操作性和操作员支持的远程操作的体系结构的研究结果。本文的重点是一种高效处理和可视化点云的方法,以满足虚拟现实应用的高帧速率要求。
为了在大距离上提供机器人及其环境的近实时反馈,该方法能够从未知对象中分割出已知对象,从而降低带宽要求。本文通过长距离的UDP/IP通信来远程操控一个工业关节式机械臂,由此来对其结果进行评估。
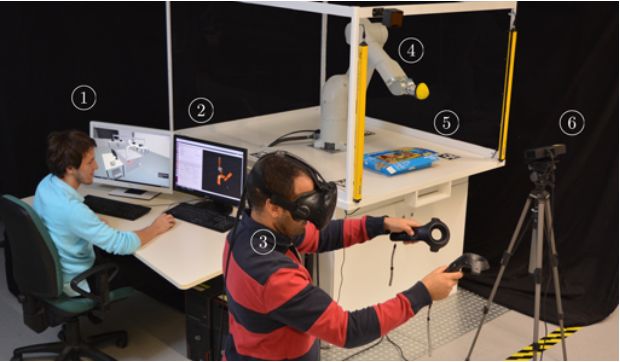
图1:显示正在进行远程操作的系统设置。
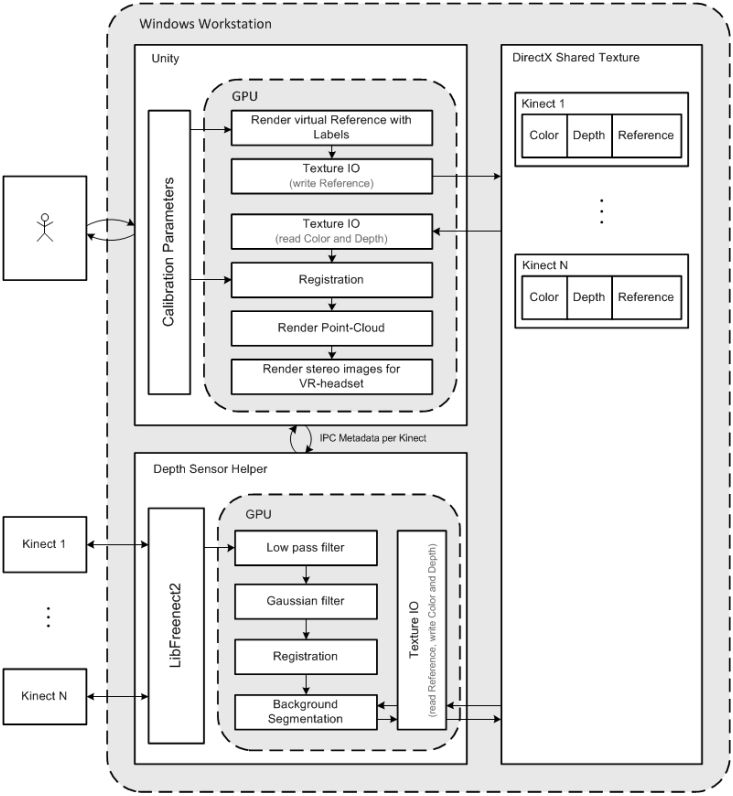
图2:用于多个RGB-D传感器捕获环境、数据预处理、分割和场景渲染的软件体系结构概述。
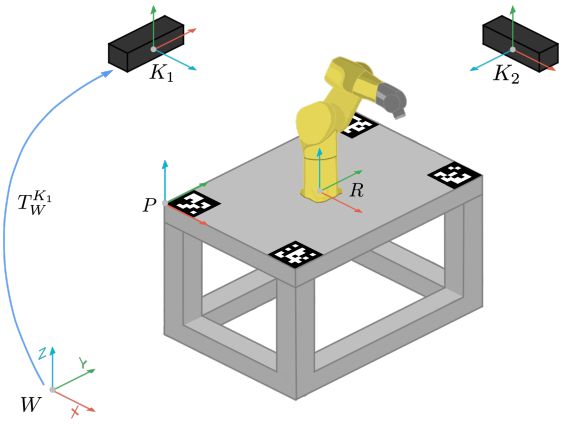
图3:使用两个摄像头(k1,k2)捕捉机器人环境的场景。在世界坐标空间W中测量每个摄像机的位置和朝向。
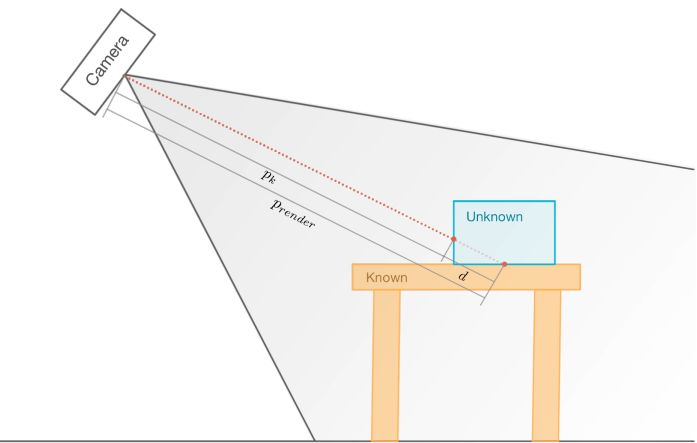
图4:使用距离函数的分割概念。
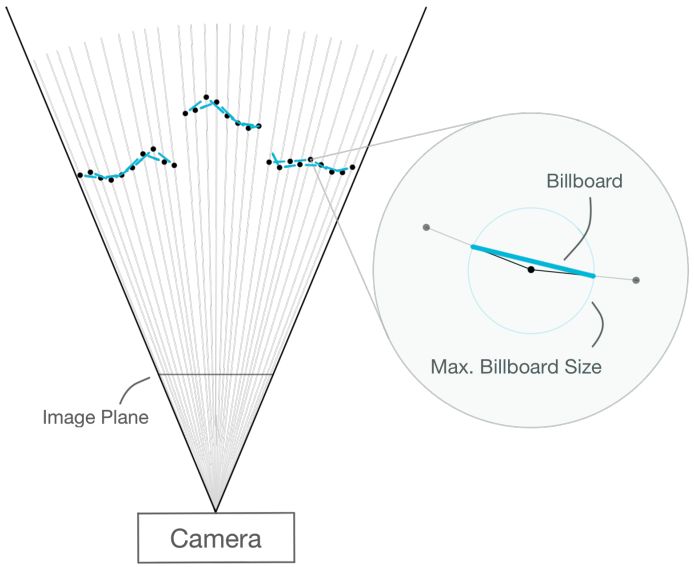
图5:所述表面绘制方法的二维轮廓。

Abstract
Over the next few years, more and more autonomous mobile robot systems will find their way into modern shop floors. However, it will be necessary to provide human-machine interfaces for interventions in unexpected situations like system-deadlocks, algorithm failures or inabilities. Using virtual or mixed reality-technologies, multi-modal teleoperation offers potential for being a suitable human-machine interface. Essential challenges in this field are, among others, a real-time remote control, a time-efficient and holistic environment detection using multiple sensors, a noise-reduced visualization of sensor-data, and capabilities of object recognition. This paper summarizes research results regarding an architecture capable of a near realtime, interoperable, and operator-supporting teleoperation. The focus of this paper is on a method to efficiently process and visualize point-clouds to meet high frame rate demands of virtual reality applications. To provide near real-time feedback of the robot and its environment over large distances, the presented method is capable to segment known objects from unknown objects to reduce bandwidth requirements. The results of this paper were evaluated using a industrial articulated robotic arm for teleoperation via a long distance UDP/IP communication.
如果你对本文感兴趣,请点击点击阅读原文下载完整文章,如想查看更多文章请关注【泡泡机器人SLAM】公众号(paopaorobot_slam)。
百度网盘提取码:ds5l
欢迎来到泡泡论坛,这里有大牛为你解答关于SLAM的任何疑惑。
有想问的问题,或者想刷帖回答问题,泡泡论坛欢迎你!
泡泡网站:www.paopaorobot.org
泡泡论坛:http://paopaorobot.org/bbs/


泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com





