阿里达摩院新研究:实习生一作突破自动驾驶技术难题,首次实现3D物体检测精度与速度兼得
乾明 发自 凹非寺
量子位 报道 | 公众号 QbitAI
最新消息,阿里达摩院又有新的研究进展,这次在自动驾驶3D物体检测领域。
达摩院的研究人员提出一个通用、高性能的检测器,在自动驾驶领域权威数据集KITTI BEV(鸟瞰)上,检测速度达到25FPS ,一举占据榜首,与排名第二的方案相比,减少了一半多,同时精度也远超其他的单阶段检测器。可以说首次实现3D物体检测精度与速度兼得。

达摩院研究团队表示:“检测器是自动驾驶系统的核心组件之一,但该领域一直缺少创新和突破,此次我们实现3D检测精度和速度的提升,将有助于提高自动驾驶系统的安全性。”
从实验结果来看,他们显然取得了良好进展,而且研究的主要完成人员(一作),还是达摩院的实习生。
同时,该研究也得到了同行们的认可,被计算机视觉领域顶级会议CVPR 2020收录。他们是如何做到的呢?我们借助阿里达摩院提供的解读,一一来看。
如何实现精度和速度兼得?
众所周知,与普通2D图像识别应用不同,自动驾驶系统对精度和速度的要求更高,不仅需要快速识别周围环境的物体,还要对物体在三维空间中的位置做精准定位。
仅靠传感器和算法模型,通常无法平衡视觉识别的精度和速度。因此,检测器成为提升自动驾驶系统安全性的一个关键因素。

经过多年研究,当前业界主流的单阶段检测器在检测速度上很好,但在检测精度却差强人意。
这就是达摩院研究的出发点:寻找一种能二者兼得的方法。
他们提出的思路是:将两阶段检测器中对特征进行细粒度刻画的思想,移植到单阶段检测中。
在他们的模型中,用于部署的检测器, 即推断网络, 由一个骨干网络和检测头组成。
骨干网络用3D的稀疏网络实现,用于提取含有高语义的体素特征。检测头将体素特征压缩成鸟瞰图表示,并在上面运行2D全卷积网络来预测3D物体框。
他们在训练中利用一个辅助网络将单阶段检测器中的体素特征,转化为点级特征并施加一定的监督信号。
在实现上,他们将卷积特征中的非零信号映射到原始的点云空间中, 然后在每个点上进行插值,来获取卷积特征的点级表示。使得卷积特征也具有结构感知能力,来提高检测精度。

而在做模型推断时,辅助网络并不参与计算(detached),保证单阶段检测器的检测效率。
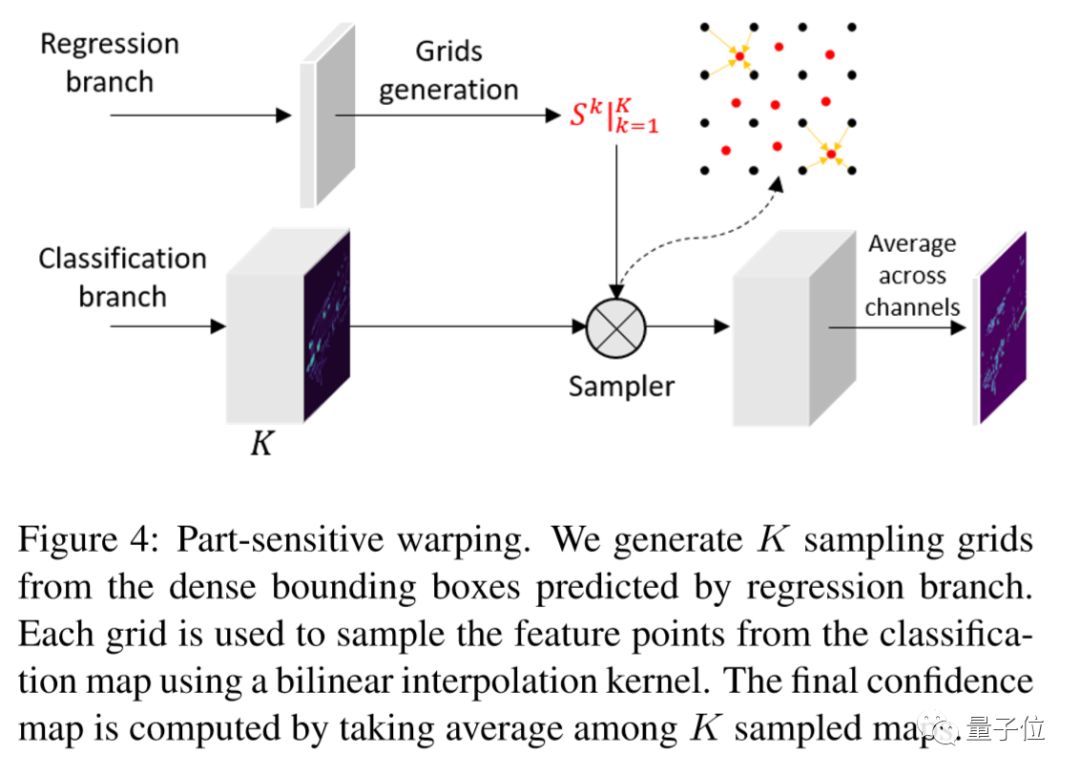
另外,他们还提出一个工程上的改进:Part-sensitive Warping (PSWarp),用于处理单阶段检测器中存在的 “框-置信度-不匹配” 问题。
核心思路是:利用采样器, 用生成的采样网格在对应的局部敏感特征图上进行采样,生成对齐好的特征图。最终能反映置信度的特征图,是K个对齐好特征图的平均。
单阶段方法,能达到两阶段方法精度
阿里达摩院的研究人员,在KITTI数据集上评估了方法的有效性。下图(PR Curve)中,实线为两阶段方法, 虚线为单阶段方法。

可以看出,达摩院提出的单阶段方法(黑色)能够达到两阶段方法才能达到的精度。
下图展示了他们在KITTI 鸟瞰(BEV) 和 3D 测试集上的结果。
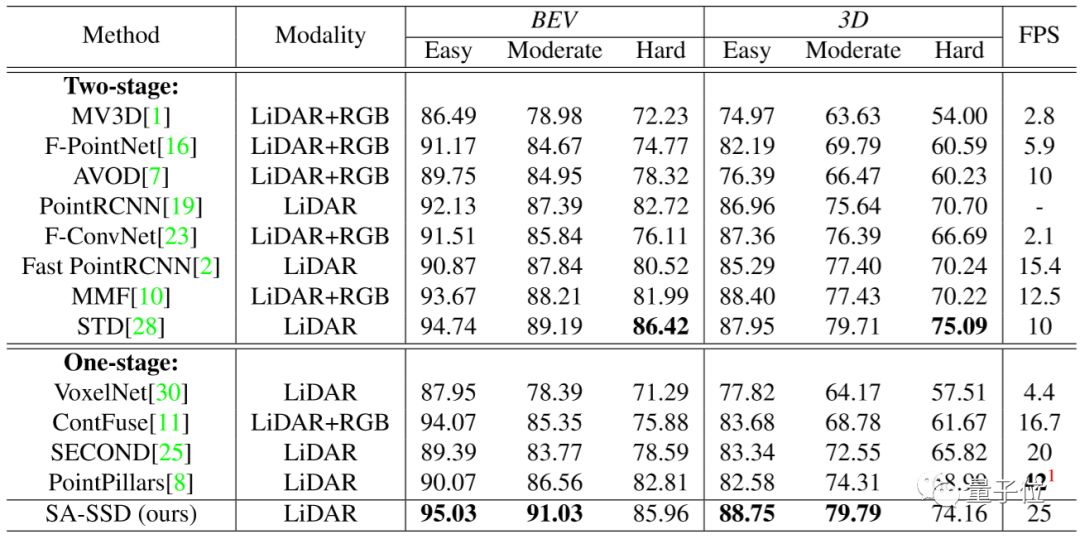
可以看出,他们提出的方法,可以在不增加额外计算量的情况下,达到25FPS 的检测速度,而且还能保持精度。具体的检测效果如下:

两位共同一作,都是达摩院研究实习生
研究论文,标题为“Structure Aware Single-Stage 3D Object Detection from Point Cloud”,共有5名研究人员参与,分别来自阿里达摩院和香港理工大学。
第一作者是Chenhang He,是阿里达摩院的研究实习生,正在香港理工大学读博,预计2022年毕业。
他的导师是达摩院高级研究员、香港理工大学电子计算学系讲座教授、IEEE Fellow张磊,也是这一研究的通讯作者。
另一位第一作者Hui Zeng,也是是阿里达摩院的研究实习生,同样是张磊的博士生,预计在今年毕业。
其他作者,分别是达摩院高级研究员、IEEE Fellow华先胜、达摩院资深算法专家黄建强等。
作者系网易新闻·网易号“各有态度”签约作者
— 完 —
戳二维码,备注“英伟达”即可报名、加交流群、获取前两期直播回放,主讲老师也会进群与大家交流互动哦~
免费报名 | 图像与视频处理系列直播课
学习计划 | 关注AI发展新动态
内参新升级!拓展优质人脉,获取最新AI资讯&论文教程,欢迎加入AI内参社群一起学习~


量子位 QbitAI · 头条号签约作者
վ'ᴗ' ի 追踪AI技术和产品新动态
喜欢就点「在看」吧 !


