摘要
目前电动自动驾驶汽车的设计趋势是基于现有的城市模型,这些模型是为汽车建造的。除非减少对车辆的总体要求,并创造更多的绿色和步行区以提高宜居性,否则城市的碳足迹将无法减少。然而,如果不提供自主的移动解决方案,这种绿色区域的规模就无法扩大。解决方案需要能够在与行人共享的空间内运行,这使得这个问题与传统的自动驾驶相比更难解决。这篇论文是开发这种自主移动解决方案的一个起点。这项工作的重点是为在行人周围运行的自主车辆开发一个导航系统。建议的解决方案是一个主动的框架,能够预测行人的反应并利用他们的协作来优化性能,同时确保行人的安全和舒适。
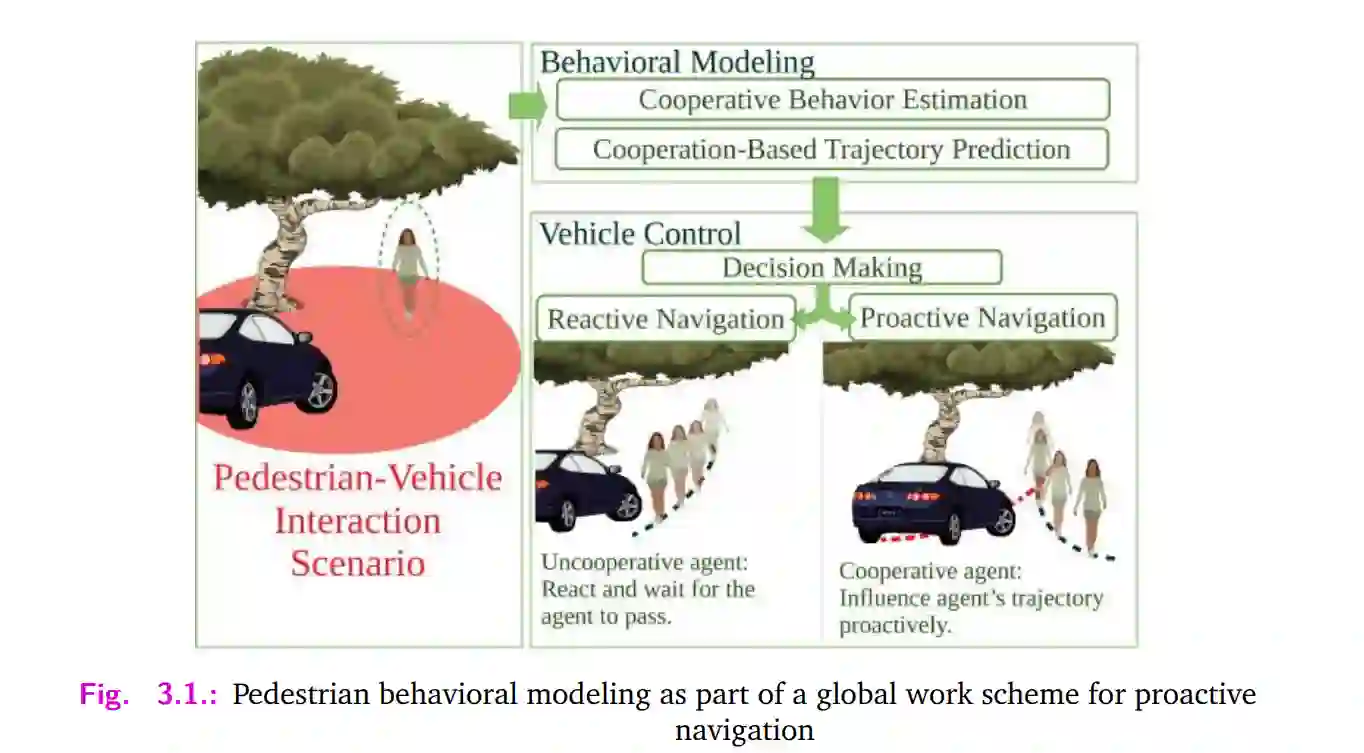
我们提出了一个基于协作的车辆周围行人行为的模型。该模型首先通过一个随时间变化的因素来评估行人与车辆合作的趋势。然后将这个因素与空间测量结合起来,预测未来的轨迹。该模型以社会规则和认知研究为基础,通过使用社会区域的概念,然后应用可变形的虚拟区域概念(DVZ)来测量每个区域内的影响。该模型的两部分都是通过手动注释数据集中的行为,利用行人与车辆的互动数据集来学习的。
此外,该模型在导航系统中被利用来控制车辆的速度和局部转向。首先,纵向速度是主动控制的。有两个标准被考虑用来控制纵向速度。第一个是安全标准,使用agent和车体之间的最小距离。第二个是使用周围agent的合作措施的主动标准。后者对于利用任何合作行为和避免车辆在密集场景中被冻结至关重要。最后,最佳控制是利用前两个标准的成本函数的梯度得出的。这是可能的,这要归功于一个建议的合作模型的表述,即使用车辆和agent之间的距离的非中心卡方(chi)分布。
使用主动的动态信道方法为空间探索推导出一个平滑的转向。该方法取决于使用模糊成本模型评估通道(子空间)中的导航成本。选择成本最低的通道,并使用通道之间的昆曲样条候选路径来影响类似人类的转向。最后,使用滑动模式路径跟踪器得出局部转向。
使用ROS下的PedSim模拟器在行人与车辆的互动场景中对导航进行了评估。在不同的行人密度和稀疏度下,对导航进行了测试。与传统的反应式方法(Risk-RRT)相比,主动式框架设法使车辆产生平滑的轨迹,同时保持行人的安全并减少旅行时间。
贡献
本论文的主要贡献有以下几点:
首次实现了一个完整的主动导航系统。以下的系统组件被整合起来,实现了一个完整的主动导航系统。据我们所知,这是第一次尝试制定、实施和测试一个围绕行人的主动导航系统。
-
一个基于合作的车辆周围行人行为模型。该模型是一个使用社会概念的2层行为模型。在第一层,行人的合作行为由一个时间变化的因素来估计和建模。在第二层,这个合作因素与空间状态测量和车辆影响相结合,用于预测行人的行为。第三章
-
一种主动的纵向速度控制方法。纵向速度是通过利用行人行为的合作性质来控制的。该控制方法是通过主动影响行人,使其合作最大化,同时保持其安全。第四章
-
一个主动的导航成本模型。该模型可用于衡量在特定子空间中导航的成本。该模型是基于行驶距离成本与基于模糊逻辑的行人干扰成本相结合。该模型在操纵系统中得到利用,但也可以独立使用,并整合到其他已有的系统中。第五章
-
一种主动的动态通道方法,用于调动行人群体。所提出的方法整合了多种概念和框架,以建立一个主动的调动系统。该系统是基于探索空间(通道)中的不同导航选项,并选择导航成本最低的最佳通道。空间通道的探索是利用全局路径的一段来完成的。而通道的选择是通过以前的成本模型完成的。通道之间的转换或局部路径的修改是通过类似人类的过渡函数完成的。此外,建议使用滑动模式控制器来执行路径跟踪。第五章
ROS下行人周围主动导航的测试和评估
-
在共享空间进行性能验证所需的评价指标的形式化。提出了在行人周围进行性能评估的必要指标。提供了每个指标计算的算法,并讨论了自主车辆导航情况下的成功/失败标准。第六章
-
收集行人-车辆互动数据集。进行了一个行人与车辆互动的实验,并收集了车辆上的行人跟踪信息。该实验提供了行人在与车辆共享空间中的行为数据,以及他们对侵略性和让步性驾驶模式的反应。所收集的数据在这项工作中被用于模型验证和作为性能评估的参考。第七章
大纲
第二章开始,介绍了主动和社会意识的导航系统的不同组成部分的一般背景。这一章提供了一个总的概述,而关于每个子系统的更详细的背景和相关工作则在相应的章节中找到。
第二部分:主动式导航框架
在这一部分中,前面图1.6所示的主动导航系统的三个组成部分将按照类似的顺序进行讨论:在第三章中,对主动导航系统的行为模型进行了讨论。
在第三章中,讨论了自主车辆周围的行人的行为模型。提出了基于合作的模型,并进行了评估。这一章还需要介绍行人与车辆的互动数据集。
第四章讨论了车辆的主动纵向速度控制。使用先前开发的行人行为模型,在模拟的行人-车辆互动中,对所提出的控制方法进行了校准和测试。
第五章讨论了车辆的转向控制。提出了空间探索的主动动态通道方法,并得出了相应的转向控制。还提供了拟议系统的校准和分析。
第三部分:实施和验证
在这一部分中,前一部分提出的三个组成部分被整合起来,以测试和验证整个系统的性能:
在第六章中,介绍并讨论了用于验证行人周围导航系统不同性能方面的性能指标。
在第七章中,主动式导航系统被集成并在ROS下的模拟共享空间环境中进行测试。在不同的行人-车辆交互场景中,对性能进行了分析,并使用之前定义的性能指标对导航进行了评估。
最后,在第八章中,对本论文中提出的工作得出了一个总体结论。对主要贡献进行了总结。此外,还对本论文未来的潜在途径和前景进行了讨论。