
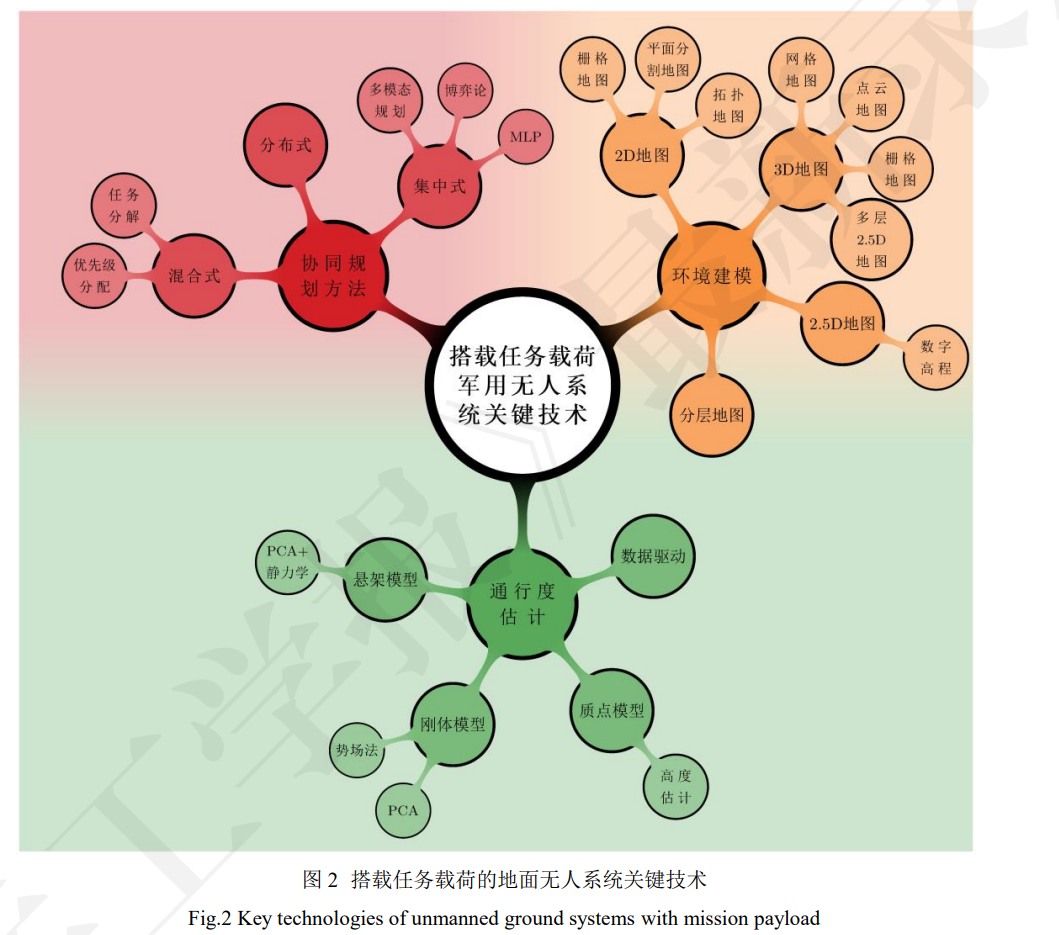
随着军用地面无人系统研究的深入,单一的地面无人机动平台或任务载荷很难满足现代战场的需求,只有任务载荷和机动平台协同发展,地面无人系统才能在战场中真正形成战斗力。为进一步推动任务载荷与机动底盘协同技术的发展,综述了搭载任务载荷军用地面无人系统的发展背景、研究现状及技术特点,分别从多层次多维度的环境建模、基于多模态数据的通行度估计、基于多智能体协同建模的协同规划控制优化方法三方面对其关键技术进行阐述,总结了相关的研究框架和重点,并对搭载任务载荷军用地面无人系统未来的发展方向进行了展望。
近年来,由于军用地面无人系统在战场中的广 阔应用前景,世界各国纷纷投入大量的研制资源, 军用无人系统发展迅猛[1]。军用地面无人系统一般 由地面无人机动平台与具有执行特定任务的上装任 务载荷构成,如侦察设备[2-4]、火力打击设备[5-6]、排 爆设备[7-8]等。军用地面无人系统在执行协同打击、 机动侦察等复合任务中,可以获取多模态的态势信 息[9],通过集中式算法快速处理多源信息进而下达 作战指令;而有人作战系统中车长、炮长、驾驶员 需要三人协同完成任务,因此在安全性、可靠性、 灵活性上军用无人系统均具有优势。顺应陆军新型 的非接触、非对称、零伤亡的作战模式,搭载任务 载荷的军用地面无人系统开始成为战场环境中重要 的作战力[10]。2015年,俄罗斯首次将军用地面无人 系统投入叙利亚战场,利用地面无人系统与无人机 形成空地一体战斗集群系统,俄军以零伤亡的代价 消灭了近两百名恐怖分子。2020年7月,美国陆军将 重型无人战车纳入作战部队单位,参加了科罗拉多 州卡森堡的士兵作战试验,成功完成相关测试。2023 年,在俄乌冲突中,俄罗斯在乌克兰军事冲突区中 投入“马克”军用无人打击系统。
成为VIP会员查看完整内容
相关内容

Arxiv
152+阅读 · 2023年3月29日
相关VIP内容
相关资讯