在目标检测技术的驱动下,被赋予智能感知能力的无人机得以实现高效灵活的数据收集能力。随着无人机 的普及与智能技术的成熟,无人机视角下的目标检测在诸多领域中作为关键核心技术,具有重要的研究意义。为了 进一步促进无人机视角下目标检测研究的发展,本文对无人机视角下的目标检测算法进行了全面的总结,并对已有 算法进行了归类、分析和比较。首先,介绍无人机视角下的目标检测概念,并总结了无人机视角下目标检测所面临 的目标尺度、空间分布、样本数量、类别语义以及优化目标等五大不均衡挑战。**在介绍现有研究方法的基础上,本 文特别整理并介绍了无人机视角下目标检测算法在交通监控、电力巡检、作物分析和灾害救援等实际场景中的应用。**然后,重点阐述从数据增强策略、多尺度特征融合、区域聚焦策略、多任务学习、以及模型轻量化等方面来提升无 人机视角下目标检测性能的方法,总结这些方法的优缺点并分析了其与现存挑战之间的关联性。之后,全面介绍基 于无人机视角的目标检测数据集,并呈现已有算法在两个较为常用的公共数据集上的性能评估。最后本文对无人机 视角下目标检测技术的未来发展方向进行了展望。
0. 引言
计算机视觉技术为无人机赋予了自主感知、分 析和决策能力,而目标检测则是提高无人机感知能 力的关键技术之一。无人机结合智能目标检测技术 可充分发挥其高机动性优势,在广阔的空中视野中 定位感兴趣目标,进而实现灵活高效的数据收集能 力。在目标检测技术的驱动下,无人机在交通监控 (Byun 等,2021)、电力巡检(Abdelfattah 等, 2020)、作物分析(Osco 等,2021a)和灾害救援 (Božić-Štulić 等,2019)等多个领域中展现出广阔 的应用前景。例如在交通监控领域,无人机可以空 中飞行进行侦测,不受道路限制,具有速度快、自 由度高、视野宽广等优点。当交通事故等突发事件 发生时,无人机可以第一时间进行响应,到达现场 进行图像采集与分析,为应急救援与管理提供及时 有效的数据支撑。在深度学习的驱动下,目标检测 技术获得了长足的发展,取得了诸多令人瞩目的成 就。然而,大多数研究聚焦于地面视频监控图像的 分析,面向无人机视角图像的目标检测还未得到充 分的研究。目前,即使是最好的目标检测算法,在 无人机图像上的平均精确率也难以达到40%(Cao 等,2021)。
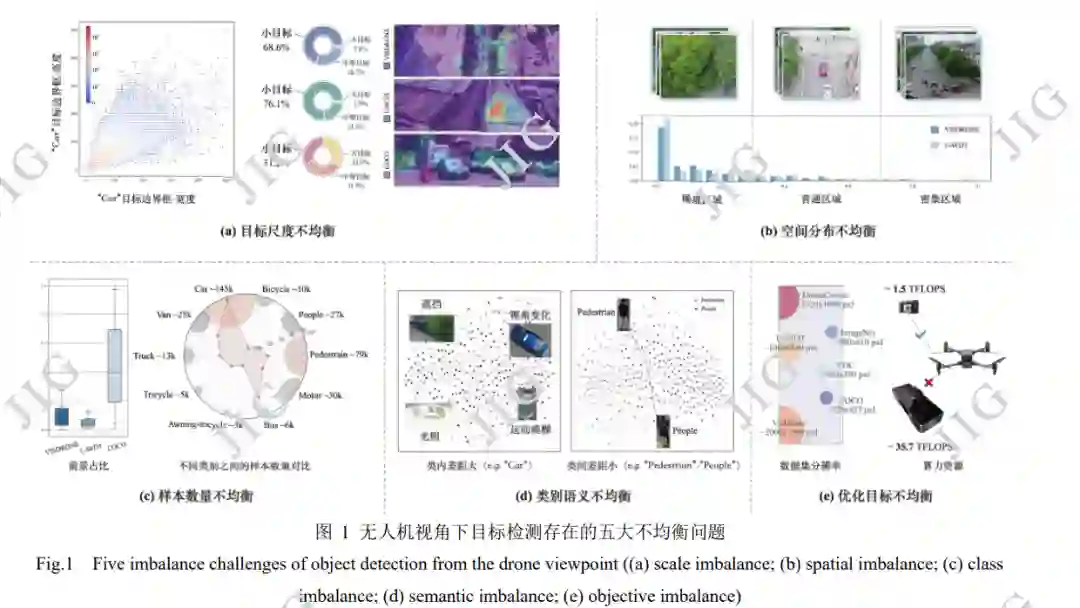
**无人机视角下的目标检测之所以难,其主要原 因在于无人机图像存在尺度变化、疏密分布、目标 数量较多且小目标占比较高等问题,特别是无人机 高分辨率图像高计算需求与现阶段低功耗芯片有 限算力之间的矛盾难以平衡。**相对于地面视角拍摄 的自然图像,无人机视角下的广阔视场意味着更为 复杂的场景和更加多样的目标,在提供更为丰富的 可视化信息的同时,也带来了更多无用噪声的干扰。特别是无人机视角下,图像中的目标往往因远端拍 摄、背景遮挡或光照影响等因素检测难度较大,需 要使用高分辨率图像提供更多的信息以达到较好 的检测效果。这极大地增加了目标检测算法的计算 开销与内存需求,特别是直接使用未经过特殊设计 的通用目标检测算法将带来难以承受的计算开销 与内存需求,进一步加剧了目标检测的难度。在实 际应用场景中,往往面临着类似于识别车辆种类这 种细粒度分类的问题,这些相似目标给模型正确识 别目标带来了巨大的挑战。此外,受限于现实世界 中的目标数量,无人机视角下某些类别的样本数量 往往极为有限,这种数据不均衡的状况也对模型的 学习能力提出了更高的要求。因此,紧密地结合智能目标检测技术,针对无 人机图像的特性设计行之有效的方法,促使模型学 习理解无人机视角下的视觉数据,对于无人机在实 际场景中充分发挥其效用是至关重要的。无人机视 角下的目标检测在应用广泛的同时面临着诸多挑 战,具有深刻的现实意义与重要的研究意义。对无 人机视角下的目标检测展开研究将有助于推动目 标检测领域的进一步发展,增强目标检测在面对真 实场景时的应用能力。
目标检测作为计算机视觉领域的基础研究,已 有学者对此进行研究与总结,并发表许多优秀的综 述。Zou等人(2019)梳理了400多篇关于目标检测 技术发展的论文,系统而全面地展现了目标检测领 域。Oksuz等人(2020)则从目标检测中存在的类别 不平衡、尺度不平衡、空间不平衡以及优化目标不 平衡等四大不平衡问题出发,对现有的目标检测算 法进行了深入的总结。Chen等人(2020)则从小目 标四大基础方法的角度出发,总结并分析了小目标 检测的相关优化思路。曹家乐等人(2022)回顾并 总结了基于单目相机的视觉目标检测方法,并对比 介绍了单目目标检测和双目目标检测的国内外研 究进展情况。然而,以上综述对于无人机视角下目 标检测的关注不够,未能系统地梳理无人机视角下 的目标检测方法和面临的挑战。 **聚焦到无人机视角下的目标检测,Mittal等人 (2020)关注低空无人机数据集,评估并总结了当 前流行的目标检测算法,但是局限于简单的性能对 比,没有深入的总结分析。**Sambolek等人(2020) 介绍了在搜索和救援行动中使用无人机的可能性, 并提供了在无人机图像中检测相关人员的方法概 述。Srivastava等人(2021)则关注无人机图像的车 辆检测,从提高精度和减少计算开销两个方面回顾 了这些工作。Bouguettaya等人(2021)则关注于无 人机视角下的车辆检测应用,总结并介绍了多种网 络结构对于改善车辆检测的贡献。江波等人(2021) 对常见的航空影像数据集进行了梳理,并对近期的 无人机目标检测研究进行了归纳和分析。杨浩然等 人(2022a)则对目标检测相关算法进行了简单的优 缺点分析。然而,这些综述对于无人机视角下面临 的挑战总结不够系统,算法方面的趋势总结较为薄 弱,而且对于目标检测算法的实际应用阐述也较少。
与以往关注通用领域的目标检测综述或仅关 注于无人机相关的特定应用场景下的综述不同,**本 文着重于对无人机视角下的目标检测这一意义重大且极具挑战性的研究领域进行系统且深入的分 析与总结。**本文首先简要阐述无人机视角下目标检 测的重要研究意义,然后将对无人机视角下目标检 测领域中存在的挑战进行系统的归纳和总结,随之 将介绍并分析无人机视角下的目标检测优化思路, 包括数据增强、多尺度特征融合、区域聚焦策略、 多任务学习、模型轻量化以及其他优化策略等。本 文将特别展示无人机视角下目标检测算法的应用, 阐明该研究的实际意义。此外,本文将介绍无人机 视角下适用于检测任务的相关数据集,并在常用的 数据集上分析对比现有算法的检测性能。最后,对 本文内容进行简要的总结,并讨论无人机视角下的 目标检测未来可能的研究方向和发展趋势。