新年快乐!无人机测控通信自组网技术综述

摘要:在天地一体化信息网络建设中,多无人机测控通信组网可有效拓展其作业范围,提升系统整体抗毁能力。首先从概念、分类、军用产品、民用发展前景等方面概述无人机系统,然后综述无人机测控自组网的技术现状、移动模型、信道模型以及网络架构,最后重点分析美军及北约典型的机载数据链系统,为无人机测控组网系统设计提供参考。
关键词:无人机通信;测控;自组网;数据链
引 言
无人机UAV(Unmanned Aerial Vehicle)起源于军事领域,用于侦察、监视、测绘、空中打击等任务。伴随无人机开放式架构的发展,有效载荷已经实现模块化,无人机在发挥ISR(情报、监视、侦察)功能的同时,可发挥打击作用。随着无线电技术、自动控制技术、计算机技术的飞速发展,无人机开始广泛应用于民用领域,如货运、航拍、交通巡线、灾难搜救、环境监测、工程建设、中继通信等[1]。无人机系统集成了飞控、测控通信、发射回收、电源等功能系统。其中,测控通信系统用于保障无人机与地面站之间控制信令和应用数据的实时可靠传输,其传输速率满足一般战术侦察和监视的需求。随着合成孔径、机载预警雷达和高分辨、多光谱、多组合传感器设备在无人机上的应用,机载数据速率将会更高,这对无人机测控通信的传输速率和容量提出了更高的要求[2]。美军及北约国家研发了战术数据链系统、宽带数据链系统以及战术瞄准网络技术(TTNT)等多型组网数据链系统,并通过制定STANAG 4586[3]等互操作标准将大量相互独立的“烟囱式”强耦合方式的战术数据链改造成为符合全球栅格(GIG)标准的栅格节点。
作为国家天地一体化信息网络建设重大工程的重要组成部分,无人机测控系统包括与地面站建立的视距空-地链路、借助通信卫星建立的超视距空-天链路或以另一架无人机作为中继平台建立的空-空链路。基于中继通信的无人机自组网具有移动性高、拓扑变化频繁、延迟短、可靠性要求高等特点,同时因其工作在开放对抗的环境中,使得网络很容易遭到各种攻击,需要达到安全机制与网络通信性能之间的平衡。上述特征使得无人机自组网在体系结构和协议设计上面临新的挑战,目前还没有形成统一标准,尚处于关键技术研究验证阶段[4]。本文首先从概念、分类、军用产品、民用发展前景等方面概述无人机系统,然后综述无人机测控组网技术的现状、模型与网络架构,最后分析美军及北约典型的机载数据链系统。
1 无人机系统
无人机系统UAS(Unmanned Aircraft System),也称无人驾驶航空器系统RPAS(Remotely Piloted Aircraft Systems),是指一架无人机、相关的遥控站、所需的指令与控制数据链路以及批准的型号设计规定的任何其他部件组成的系统。
1.1 无人机分类
无人机可依据用途、飞行高度、作用距离、机型规模、动力类型与起降方式等分类。军用无人机可分为侦察无人机、诱饵无人机、电子对抗无人机、通信中继无人机、无人战斗机以及靶机等。民用无人机可分为巡查监视无人机、农用无人机、气象无人机、勘探无人机以及测绘无人机等。无人机按飞行高度可分为超低空hA<100m、低空hA∈[100m, 1000m]、中空hA∈[1000m, 7000m]、高空hA>7000m等。按作用距离可分为超近程dAG<15km、近程dAGÎ[15km, 50km]、短程dAGÎ[50km, 200km]、中程dAGÎ[200km, 800km]、远程dAG>800km等。按照能源与动力类型可分为螺旋桨式无人机、喷气式无人机、电动无人机、太阳能无人机、燃料电池无人机等。按照飞机结构型态,无人机主要分为两大类:一类是垂直起降型无人机,主要包括无人飞艇、单旋翼无人机和多旋翼无人机等;另一类是非垂直起降型无人机,主要包括固定翼无人机、三角翼无人机及伞翼无人机等。按照起飞重量,无人机可分为小型无人机、中小型无人机以及中大型无人机。小型无人机的起飞重量小于50kg,中小型无人机的起飞重量在50kg~500kg之间,中大型无人机的起飞重量超过500kg。
1.2 军用无人机产品
根据《The Military Balance 2017》数据,美军2016年装备无人机共计1116架(不包括微型无人机)。美军无人机的主要供应商为诺斯罗普·格鲁门公司、通用原子公司、洛克希德马丁公司、波音公司等。此外,根据美国《无人系统路线图(2013-2038)》的数据[5],美军还装备了RQ-11“乌鸦”、“黑色大黄蜂”、RQ-20“美洲狮”、RQ-16“雷鹰”四种型号数百架的微型无人机。图1所示为美军典型的捕食者、影子与大乌鸦等无人机系统。以色列在中小型战术无人机方面水平与美国相当,研制公司主要是以色列飞机工业公司马拉特(MALAT)分部和埃尔比特(Elbit)公司,典型产品有“哈比”、“猎人”、“搜索者”、“苍鹭”、“赫尔墨斯”、“云雀”等。
(三)建立单亲家庭学生档案并进行个案追踪。了解和掌握班级内单亲家庭子女人数,并熟悉掌握其家庭状况、单亲原因等,建立单亲家庭学生档案。学生工作者应加强对他们的学习、生活、心理、行为和家庭情况的了解、跟踪,并详加记录。同时把每个单亲家庭学生的教育责任到人,由班主任或任课教师或其他责任人负责其心理疏导、学习辅导、生活关照、行为矫正等,定期与家长联系,掌握单亲家庭学生在家中和社会上的情况。
国际各无人机系统标准化组织制定了一系列互操作性标准,包括北约发布的无人机控制系统接口标准(STANAG 4586)和机动车工程师协会无人机系统工作组SAE AS-4发布的联合无人系统体系结构(JAUS)系列标准。与STANAG 4586兼容能使北约成员国使用各自的无人机系统和地面控制站设备联合支持军事作战行动。这极大增强了成员国无人机之间的互操作性,并可通过一种通用地面接口实时共享各国无人机系统处理的数据和信息。JAUS标准定义了一种模块化、松耦合、可扩展的体系结构,以及一组与具体应用无关、可重用的构件和服务,同时规定了进行内部和外部通信的标准接口消息,从而使符合JAUS标准的无人系统具备互操作能力。
国内无人机系统研发机构主要有:西北工业大学无人机研究所、北京航空航天大学无人机所、南京航空航天大学无人机研究院、中国航天科技集团公司、中国航天科工集团、中国航空工业集团、中国电子科技集团公司等,研制出的无人机尺寸从小到大,起飞重量从轻到重,在应用方面从各种形式的侦察监视到攻击等,以“彩虹”、“翼龙”系列为代表,形成了较为完备的体系。图2所示为中美典型无人机比较。航天科技集团公司的彩虹系列无人机是中国目前型谱最齐全、最早实现出口的无人机,包括彩虹1-5、彩虹801-805以及9系列彩虹无人机。

图1 美军典型无人机系统示意图
Fig. 1 Typical USA military UAS
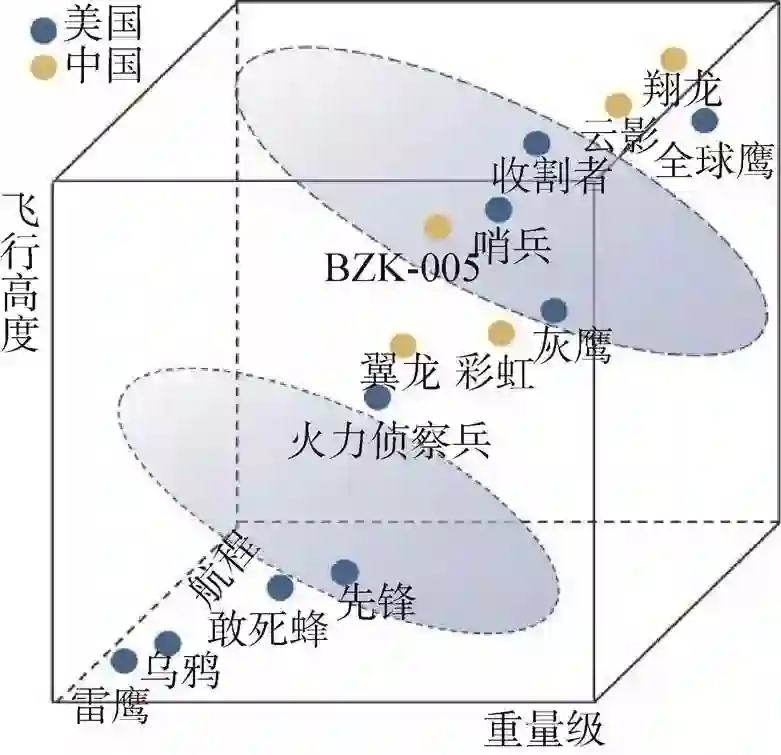
图2 中美典型军用无人机图谱
Fig. 2 Typical USA and China military UAVs
1.3 民用无人机发展前景
在民用领域,2017年6月,工业和信息化部发布了无人机驾驶航空器系统标准体系建设指南,确立了无人机驾驶航空器系统标准体系三步走建设发展路径,明确了系统标准体系建设的总体要求、建设内容和组织实施方式。2017年底,工业和信息化部发布了关于促进和规范民用无人机制造业发展的指导意见,加快推进民用无人机在农林植保、物流快递、地理测绘、环境监测、电力巡线、安全巡查、应急救援等行业领域创新应用,推进人工智能在民用无人机领域融合应用。工信部在2015年出台标准规定了840.5MHz~845MHz、1430MHz~1444MHz和2408MHz~2440MHz频段用于无人驾驶航空器系统,包括遥控和数传电台等,表1列出了国际与国内无人机使用频率。
表1 无人机规定使用频段
Table 1 UAV regulated frequency
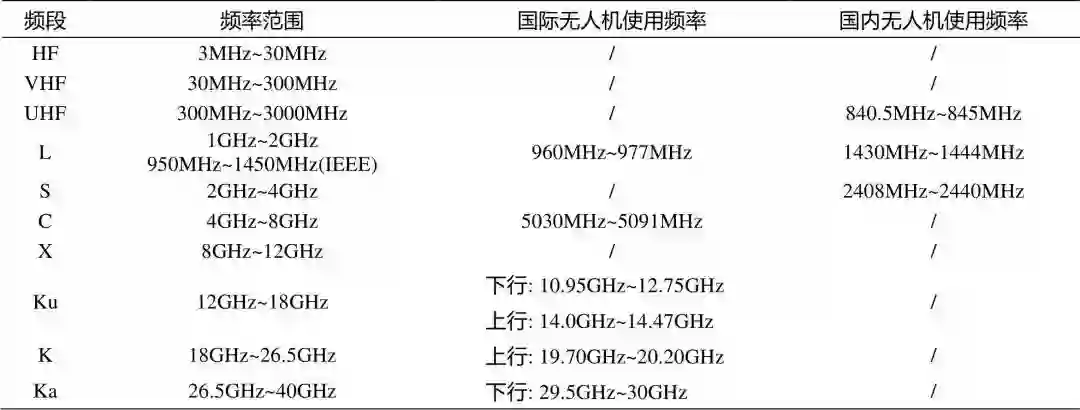
频段频率范围国际无人机使用频率国内无人机使用频率 HF3MHz~30MHz// VHF30MHz~300MHz// UHF300MHz~3000MHz/840.5MHz~845MHz L1GHz~2GHz950MHz~1450MHz(IEEE)960MHz~977MHz1430MHz~1444MHz S2GHz~4GHz/2408MHz~2440MHz C4GHz~8GHz5030MHz~5091MHz/ X8GHz~12GHz// Ku12GHz~18GHz下行: 10.95GHz~12.75GHz上行: 14.0GHz~14.47GHz/ K18GHz~26.5GHz上行: 19.70GHz~20.20GHz/ Ka26.5GHz~40GHz下行: 29.5GHz~30GHz/
2 无人机测控自组网通信
根据ITU-R M.2171报告定义,无人机系统通信链路是指控制和无载荷链路(CNPC),主要包括指挥与控制(C&C)、空中交通管制(ATC)、感知和规避(S&A)三种链路。根据文献[6]分析,目前世界上已超过1/3的主要国家或地区制定了无人机管理法规,绝大多数都要求无人机装配卫星导航与通信控制设备。视距内通信的无人机多数安装全向天线,定向天线主要用来拓展作用距离或提高传输速率,需要超视距通信的无人机一般采用自跟踪卫通天线。视距内通信链路地面天线采用鞭状天线、平板天线或自跟踪抛物面/平板天线,需要超视距通信的地面控制站还会采用卫通天线。因此组网无人机系统主要包含无人机与地面站的空-地链路、无人机之间的空-空链路以及无人机与卫星的空-天链路,构成空-天-地一体化信息网络。其中,无人机自组网技术一般指小型无人机之间的自组网。
由表5可知,采用异步连续摊铺技术铺筑的水稳基层含水量、水泥剂量与压实度均符合规范要求。各路段上、下层位含水量均不超过最佳含水率±0.5%,水泥剂量与设计值相差不超过1.0%,且底基层压实度值均大于96%,基层压实度均大于98%,符合规范压实度要求。
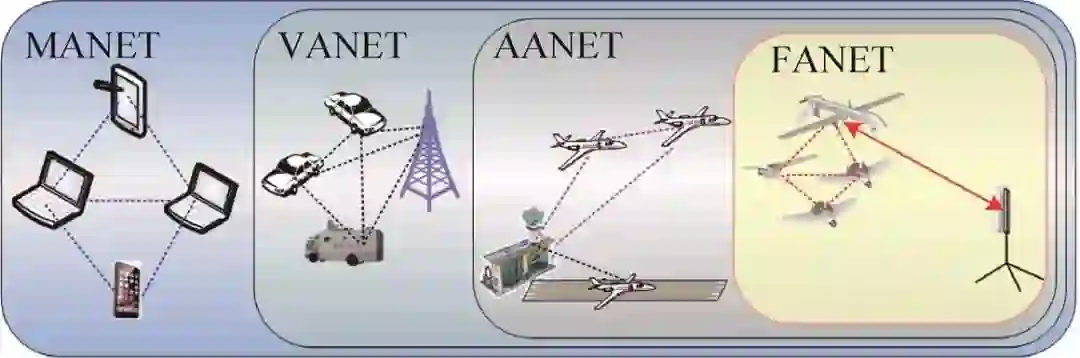
图3 MANET、VANET、AANET与FANET的关系
Fig. 3 Relation among MANET, VANET, AANET and FANET
无人机测控通信系统的机间自组网可提高多无人机系统的可扩展性,提升无人机间通信的可靠性与抗毁性,有效辅助其他通信方式组成空天地海一体化信息网络,降低无人机集群的载荷量和成本[7]。如图3所示,不同于移动自组网(MANET)、车载自组网(VANET)、民航航空自组网(AANET)等自组网系统,无人机自组网(FANET)作为一种特殊的MANET,除了具有无线自组网本身所具有的多跳性、自组织性、无中心等固有特点,还具备一些和无人机相关的特点,如节点高速移动导致网络拓扑快速变化、组网节点稀疏性和网络异构性、网络节点对等连接与数据中继能力[8]。
2.1 关键技术
美国曾在2000年将无人机自主控制能力分为10个等级,如图4所示。其中最高等级为集群自主控制,它要求智能无人机集群系统在复杂环境下实现无人多任务目标全自主规划。现有装备无人机自主控制水平很少超过4级[1]。要真正实现集群的完全自主控制,还需要解决如下关键技术:环境感知与认识、多机协同任务规划与决策、信息交互与自主控制、人机智能融合与自适应学习技术。无人机飞控系统主要有固定翼飞控系统、开源飞控系统与自研飞控系统,其中开源飞控产品主要有Arduino、Ardu Pilot Mega、PX4、PIXHawk、OpenPilot、Multi Wii Copter、Paparazzi等。自组网无人机飞行中的避障技术主要有超声波避障技术、红外线或激光避障技术、视觉图像复合型技术、RealSense红外动态投影技术、微波雷达技术、立体电子地图导航技术等。现有的反无人机技术主要包括探测跟踪预警技术、毁伤技术、干扰技术、伪装欺骗技术等。无人机测控与通信数据链抗干扰技术则常采用扩频抗干扰技术、自适应干扰抑制技术、信源与信道编码技术、智能调零天线技术、自适应陷波技术、基于认知的抗干扰技术等。
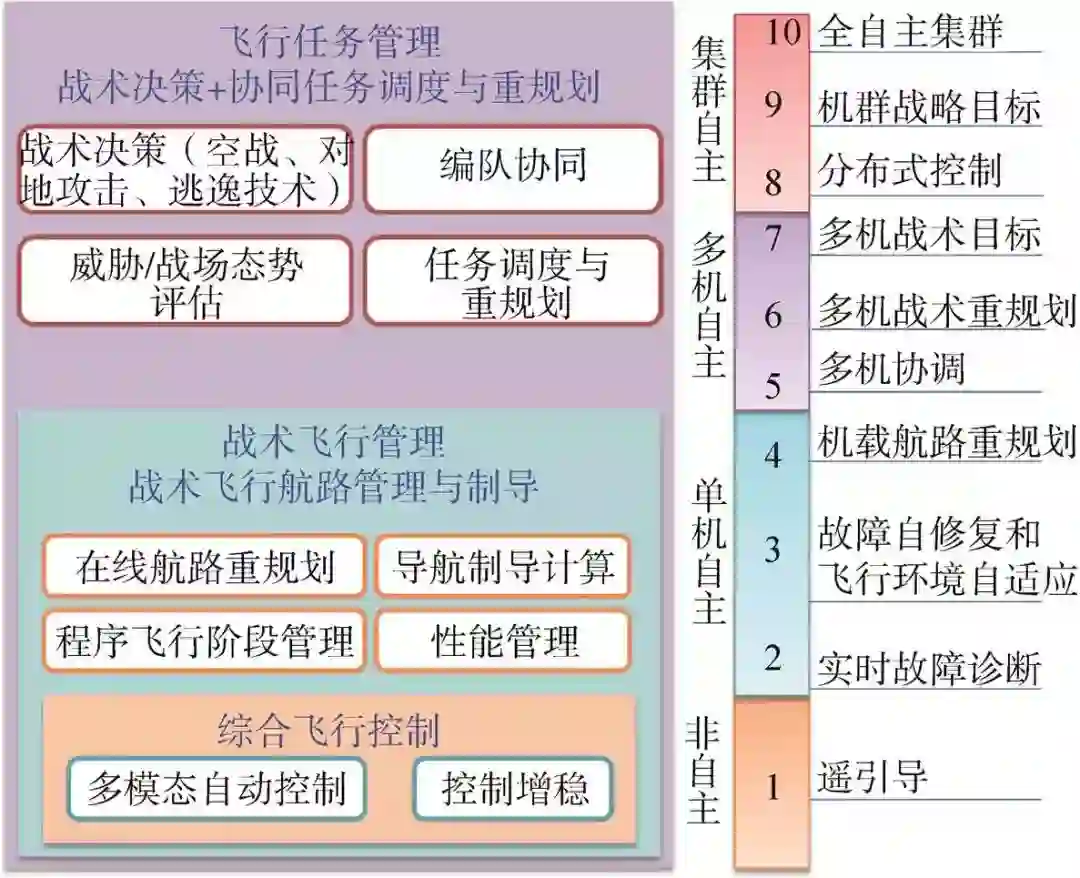
图4 无人机自主控制能力等级
Fig. 4 UAV automatic capabilities levels (ACL)
2.2 国内外技术现状
国外研究机构针对专用网络或移动通信标准网络,研究了MANET、VANET、AANET、FANET等自组网通信技术。关于FANET自组网技术的研究主要集中在信道测量建模[9-12]、机载与地面天线[13]、MIMO与多载波抗多径传输技术[14]、高动态随机接入技术[15]、高效路由技术[16,17]等。美军除了战术数据链和宽带数据链,还针对载人战斗机开发了两种专用的机间数据链:飞行编队间数据链(IFDL)和多功能先进数据链(MADL)。IFDL是F22战斗机编队内组网专用的窄波束天线阵数据链,MADL是F35战斗机编队内组网专用的由6副相控阵天线组成的Ku频段数据链。美空军发布的《美空军小型无人机系统飞行计划:2016-2036》中强调,联合互操作性是小型无人机系统能力发展不可或缺的一环。目前美方典型的无人机集群自组网项目主要有小精灵项目、拒止环境中协同作战项目、“山鹑”微型无人机项目、低成本无人机集群技术项目等,特点对比如表2所示。为了应对未来跨域协同作战需求,美军继续推进有人-无人编队技术研究,典型项目有美空军“忠诚僚机”项目、美海军的战术作战管理器(TBM)项目、美陆军无人机操作最佳角色分配管理控制系统(SCORCH)项目和有人-无人机编队拓展能力(MUM-X)计划等。
利用ArcGIS 10.2的探索性分析模块计算OLS分析的结果如图2所示:容积率、绿化率、地铁站、主干道、商贸中心、医院、海岸线、幼儿园和中学距离这几个变量的概率b均小于0.05,即所有的变量在5%水平的显著性检验下都很显著,所以利用这九个变量构建 GWR 模型 [16,17]。
表2 美方典型无人机集群研究项目
Table 2 Typical USA military UAV swarm projects

项目机构时间能力特点 拒止环境中协同作战(CODE)DARPA2014抗干扰、适应能力强、多机协同、智能自主 山鹑(Perdix)美国国防部战略能力办公室(SCO)2014空中释放、信息共享、集体决策、编队飞行 小精灵(Gremlins)DARPA2015低成本、高效快速、空中发射和回收、可重复使用 低成本无人机集群技术(LOCUST)美国海军研究办公室(ONR)2015低成本、体积小、数量多、快速发射、完全自主编队 进攻性蜂群使能战术(OFFSET)DARPA2017开放式软件系统架构、博弈软件、沉浸式交互 近战隐蔽一次性自主无人机(CICADA)美国海军研究实验室(NRL)2017多模式传感器、低成本探测矩阵、侦察及情报搜集
国内无人机自组网技术研究尚处于起步阶段,正快速发展,大规模无人机组网通信主要还是以编队控制形式出现,陆军近些年也发布了“蜂群作战无人机系统”项目。国内军民无人机测控与组网系统的研制主要有:北京遥测技术研究所研制的L频段超近程无人机组网系统,如图5所示,它基于TDD-TDMA体制实现了多架无人机机间中继通信,数据传输速率在2Mb/s~10Mb/s[18-21];中国电子科技集团五十四所研制了L频段微型或微小型超近程无人机通信系统,其上行数据速率3.2kb/s、下行数据速率2Mb/s~4Mb/s。无人机测控系统在实现自组织网络的同时,还可将小型化数据链设备安装在武器平台上,建立武器与无人机指挥系统间信息传输的武器数据链,将各类作战平台和武器系统连接成网络,实现对武器弹药的目标数据引导,提高精确打击目标的能力。我国还自主研发了功能类似于Link-11数据链的HN-900数据链[22]、海军已装备的H/TJN906高速宽带数据链以及三军联合通用型数据链系统JIDS等,这些数据链在未来与无人机系统的组网联合作战中都将极大提升网络中心站能力。
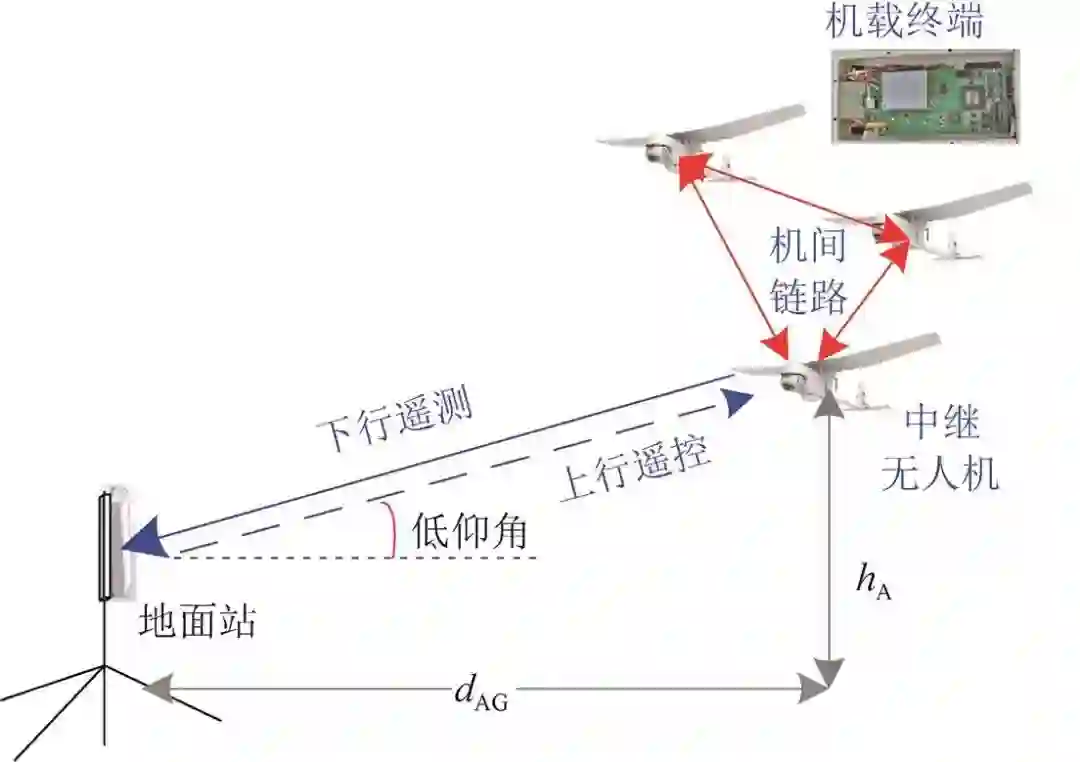
图5 无人机飞行自组网系统
Fig. 5 UAV FANET system
2.3 移动模型与信道模型
无人机组网架构与机载网络移动模型密切相关,传统MANET常用随机游走(RW)模型、随机路径移动(RWP)模型、随机方向(RD)模型、参考点群组移动(RPGM)模型、Manhattan格状移动(MGM)模型、Gauss Markov模型(GMM)等[8,23]。无人机FANET网络移动模型主要有[24]:半随机圆周运动模型SRCM(Semi-Random Circular Movement model)、平滑转向移动模型STMM(Smooth Turn Mobility Model)、飞行计划移动模型(flight plan mobility model)、三向随机模型与信息素排斥移动模型(three-way random and pheromone repel mobility models)等。
信道模型分析对通信组网方案设计也有很大影响。从Hass[25]开始对民航航空通信中的起飞/降落、滑行、停泊与在途几种飞行阶段用广义平稳非相关散射WSSUS(Wide-Sense Stationary Uncorrelated Scattering)模型分析后,Rice[26-28]研究了飞机遥测空-地链路信道及多天线空时码的分集性能,Matolak团队[29,30]针对大型与小型机场塔台、停机坪与登机口等地面通信链路进行建模分析。Matolak团队[9-11]还测量分析了山地丘陵、海洋与近郊等场景下无人机低仰角空地链路信道模型。日本NICT团队[31,32]测量分析了不同场景下无人机空空链路的信道模型。Lee[33,34]则测量分析了海上无人机通信蒸发波导等信道特性。
2.4 组网架构
无人机测控通信自组织网络系统中无人机节点可以通过单跳或多跳的方式共享网络资源,具有组网快速灵活、可靠性高、抗毁性强等特点,一般可分为单一型无人机自组网、分簇自组网与分层自组网三种网络拓扑结构,如图6所示。类似于基于IEEE 802.11p协议标准[35]的车载自组网VANET,无人机飞行自组网FANET具有高移动性,其协议设计需要考虑数据包时延、链路质量变化和链路中断等因素[36]。针对无人机空-空通信的解决方法主要有两类:射频全向通信、射频或自由空间光(FSO)定向通信[37]。机间定向通信常需要全向天线保持链路来完成组网无人机间的协调任务。机间自组网协议设计还需从系统角度考虑无人机集群通信中空地测控与高速数传并存、立体随机接入与路由策略设计、物理层至网络层与全向或定向天线紧密约束、天线安装方式与机身遮挡影响、民用无人机须视距内飞行等问题。其中,网络初始建立过程中的随机接入协议相对更具挑战性。
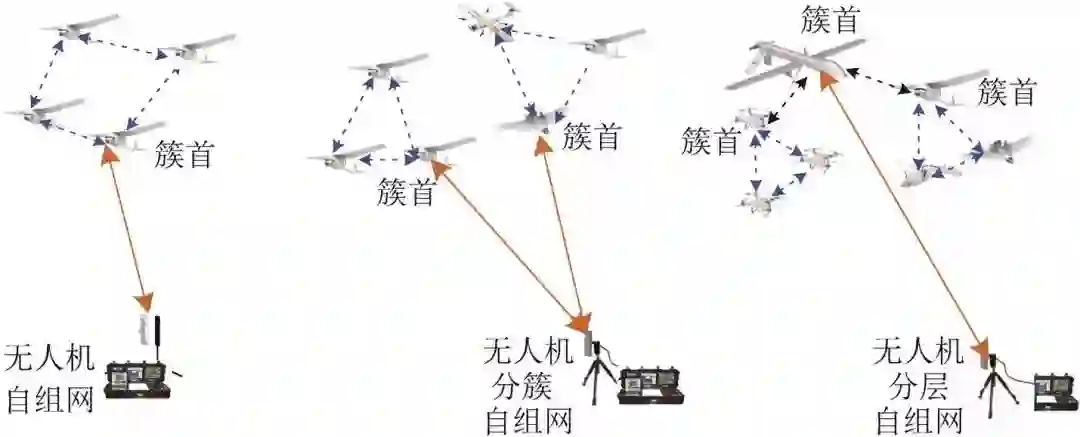
图6 无人机自组网及分簇、分层自组网
Fig. 6 UAV FANET, clustered FANET, and layered FANET
MAC协议常用的性能指标包括吞吐量、时延、公平性、稳定性、鲁棒性和QoS等。按照信道获取方式的不同,无线网络MAC协议可划分成:①固定分配MAC协议,如时分多址(TDMA)、频分多址(FDMA)、码分多址(CDMA)和空分多址(SDMA)等;②随机竞争MAC协议,如ALOHA系列协议、载波侦听多址(CSMA)系列协议;③预约MAC协议,它属于中心节点控制信道动态分配的接入协议。固定分配MAC协议适用于业务量平稳、时延敏感和拓扑稳定的情况;随机竞争MAC协议适用于业务量突变、低时延和拓扑变化的情况;预约MAC协议适用于业务量突变、业务具有QoS要求和拓扑变化的情况。针对无人机自组网的路由协议研究一般包括基于传统的先应式或反应式路由协议改进、基于地理位置的路由协议或基于分簇的路由协议等[17]。针对无人机自组网的安全技术研究包括安全需求分析与安全机制设计[4][38]。基于波束形成定向天线的多跳无线网络协议研究常参考IEEE 802.11协议,需要解决定向波束形成带来的聋问题和定向隐终端问题两大挑战。评估技术协议性能时,常用的网络仿真平台有NS-2、OMNeT++、QualNeT和OPNET。其中,OPNET和QualNeT的仿真库提供了有线和无线网络研究和商业开发需要的大多数模型,用户可以高效地建立网络仿真模型,但无人机节点结构、链路信道特性、多无人机系统标准和移动特征等影响无法体现在仿真中。无人机机载自组网通信尚无公开的技术标准协议,在这些关键技术标准化与工程实现过程中,可借鉴美军在用的数据链自组网协议。
3 机载数据链通信系统
数据链本质上是由通信设备和通信协议创建的具有一定拓扑结构的网络,是一种结合管理控制和数据通信的系统,可以保证战术信息高效实时地传输。数据链系统主要包括消息标准、通信协议和传输设备三部分。数据链通常分为点对点数据链和网状数据链两类。在网络中心战系统中,自组织技术用于设计有效的无人机中继网络,提供战场设备间可靠连接[38]。作为美国国防部DoD(Department of Defense)全球栅格的一部分,机载网络拓展连接了战场的空、天、地作战领域。
CDL是美军情报、监视和侦察(ISR)主要的点对点通信协议,适用于所有机载有人、无人平台ISR传感器的DoD标准波形。CDL系列波形标准定义了S、C、X、Ku、Ka波段终端,计划到2020年支持自动组网(self-forming)、自动重构(self-healing)的自组织网络、中断容忍网络(DTN)、动态多址网络管理、基于策略的自动网络管理以及认知通用宽带数据链[39]。CDL可采用定向天线,支持X与Ku频段全双工地空非对称链路视距通信,上行链路速率200kb/s,下行链路10.71Mb/s、137Mb/s、274Mb/s[40]。文献[41]设计了半双工CDL网状网。TCDL采用开放系统架构,可与CDL在Ku频段上行链路200kb/s、下行链路10.71Mb/s条件下实现完全互操作。
观察组痊愈30例,显效5例,有效2例,无效1例,总有效率为97.37%;对照组痊愈21例,显效6例,有效5例,无效6例,总有效率为84.21%,观察组明显优于对照组,两组比较,差异有统计学意义(P<0.05)。
Link-11为北约(NATO)设计的战术数字信息链TADIL-A(Tactical Digital Information Link),它是采用轮询呼叫工作方式的安全半双工窄带战术数据链,可实现HF、UHF频段的机载(Link-11A)、地面与船载(Link-11B)战术数据系统之间数字信息交互。Link-16(TADIL-J)用于空空、舰空、地空链路L波段跳频模式,采用TDMA协议,速率可达115.2kb/s,采用联合战术信息分发系统JTIDS(Joint Tactical Information Distribution System)作为通信组件,用于包含无人机在内的各种战术用户之间交互战术信息。Link-22作为北约具备自动中继能力的超视距通信安全无线电系统,在克服Link-11缺陷的同时,补充了Link-16,并实现了互操作。Link-22工作在HF、UHF频段,速率可达127kb/s,采用TDMA或动态TDMA多址技术,每个设备可同时工作在4个网络中。
下一代数据链战术瞄准网络技术(TTNT)是基于IP的全双工自组网协议,由DARPA开发,用于联合战术无线电系统JTRS(Joint Tactical Radio Systems)。TTNT采用全向和定向天线,可支持超过200个节点自组网,采用OFDM体制跳频跳时传输,不同节点可同时占用不同的信道进行发送或接收,作用距离185km时传输速率达2Mb/s,且时延小于2ms。TTNT可工作在3个波段共16个跳频点:Band1(1755MHz~1850MHz)、Band2(1435MHz~1518MHz)、Band 3(1350MHz~1390MHz)[40]。TTNT网络层采用开放最短路径优先OSPF(Open Shortest Path First)路由协议,数据链路层采用统计优先多址SPMA(Statistical Priority Multiple Access)技术,这是一种基于信道占用状态的优先接入技术,通过信道拥塞度统计来控制不同优先级分组数据的传输。每个独立节点采用相同状态转移策略,统计一段时间内信道中截取的突发数据包数目,与信道接入门限比较,同时基于退避算法最大化利用信道传输容量。与CSMA相比,SPMA降低了接入信道前等待时间(无握手机制),另一方面,SPMA提供不同报文优先级,保证高优先级报文的成功接入概率。
芬兰北部拉普兰地区,白雪晶莹,树木挺秀,这里每年3月15日是独特的赛鹿节。拉普人身着绚丽的民族服装,扶老携幼来到伊利那大湖周围比赛场地,场上帐篷处处,旗帜飘扬。比赛在冰冻的湖面上进行,每头赛鹿由一名手执缰绳的驯鹿者驾驭。驯鹿者身穿滑雪衣,头戴护目镜,脚上系着滑雪板。号令一响,许多赛鹿便在冰上跑了起来。驯鹿者要驱使赛鹿跑完2公里的路程,还要顺利地通过一个特设的急转弯,然后抵达终点。
对美军及北约典型机载数据链系统从频段、速率、调制编码、传输技术与组网方式几个方面进行总结对比,如表3所示。从机群组网测控与高速数据链传输的角度可见,TTNT协议与无人机机间自组网需求更接近,CDL点对点宽带传输系统在空-地链路下行高速传输上更有优势。
表3 美军及北约典型机载数据链通信系统
Table 3 Typical USA and NATO military airborne datalink communication systems
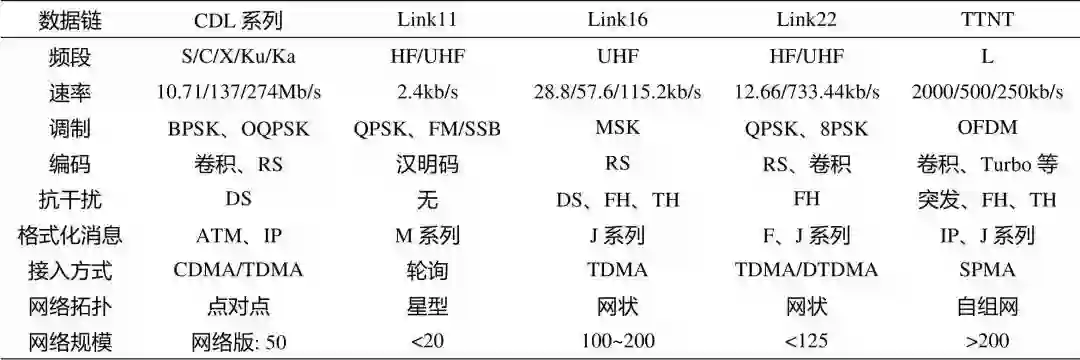
数据链CDL系列Link11Link16Link22TTNT 频段S/C/X/Ku/KaHF/UHFUHFHF/UHFL 速率10.71/137/274Mb/s2.4kb/s28.8/57.6/115.2kb/s12.66/733.44kb/s2000/500/250kb/s 调制BPSK、OQPSKQPSK、FM/SSBMSKQPSK、8PSKOFDM 编码卷积、RS汉明码RSRS、卷积卷积、Turbo等 抗干扰DS无DS、FH、THFH突发、FH、TH 格式化消息ATM、IPM系列J系列F、J系列IP、J系列 接入方式CDMA/TDMA轮询TDMATDMA/DTDMASPMA 网络拓扑点对点网络版: 50星型网状网状自组网 网络规模<20100~200<125>200
4 结束语
无人机遥测遥控、通信导航等系统亟待可靠的空-地、空-空链路实现三维立体组网节点间的信息交互、态势共享。本文首先介绍无人机平台分类与主要产品,然后综述无人机测控自组网技术现状、移动模型与测控信道、组网架构,最后分析美军及北约典型机载数据链系统。无人机测控组网的随机接入、网络路由、信道建模与抗多径传输等技术还有待进一步阐述分析。无人机有望在军用警用、民用商用、遥感测绘、通信中继等应用领域进一步延伸,与地面移动车、高低轨卫星、空中有人机、海上无人船等形成有机整体,成为国家“空天地海一体化”工程综合性解决方案中的一个重要机动组成部分。
参考文献
[1] Namuduri K, Chaumette S, Kim J H, et al. UAV Networks and Communications[M]. London: Cambridge University Press, 2018.
[2] 李凉海. 从IRIG 106遥测标准看遥测新发展[J]. 遥测遥控, 2017, 38(1): 1–7.Li Lianghai. New Development of Telemetry Technology Viewed from IRIG Standard 106-15[J]. Journal of Telemetry, Tracking and Command, 2017, 38(1): 1–7.
[3] NATO Standardization Agency (NSA). STANAG 4586-Standard Interfaces of UAV Control System (UCS) for NATO UAV Interoperability[S]. 2012.
[4] Maxa J A, Mahmoud M S B, Larrieu N. Survey on UAANET Routing Protocols and Network Security Challenges[J]. Ad Hoc & Sensor Wireless Networks, 2017, 37(1-4): 231–320.
[5] Department of Defense’s (DoD). Unmanned Systems Integrated Roadmap[R]. FY2013-2038. 2014.
[6] Stöcker C, Bennett R, Nex F, et al. Review of the Current State of UAV Regulations[J]. Remote Sensing, 2017, 9(5): 1–26.
[7] 闫朝星, 付林罡, 郑雪峰, 等. 基于无人机自组网的空海一体化组网观测技术[J]. 海洋科学, 2018, 42(1): 21–27.Yan Chaoxing, Fu Lingang, Zheng Xuefeng, et al. Air-sea Integrating Network for Over-sea Observation Systems Based on UAV Ad Hoc Networking[J]. Marine Sciences, 2018, 42(1): 21–27.
[8] 卓琨, 张衡阳, 郑博, 等. 无人机自组网研究进展综述[J]. 电信科学, 2015(4): 1–11.Zhuo Kun, Zhang Hengyang, Zheng Bo, et al. Progress of UAV Ad Hoc Network:A Survey[J]. Telecommunications Science, 2015 (4): 1–11.
[9] Matolak D W, Sun R. Air-ground Channel Characterization for Unmanned Aircraft Systems - Part I: Methods, Measurements, and Models for Over-water Settings[J]. IEEE Transactions on Vehicular Technology, 2017, 66(1): 26–44.
[10] Sun R, Matolak D W. Air-ground Channel Characterization for Unmanned Aircraft Systems - Part II: Hilly and Mountainous Settings[J]. IEEE Transactions on Vehicular Technology, 2017, 66(3): 1913–1925.
[11] Matolak D W, Sun R. Air-ground Channel Characterization for Unmanned Aircraft Systems - Part III: the Suburban and Near-urban Environments[J]. IEEE Transactions on Vehicular Technology, 2017, 66(8): 6607–6618.
[12] Sun R, Matolak D W, Rayess W. Air-ground Channel Characterization for Unmanned Aircraft Systems - Part IV: Airframe Shadowing[J]. IEEE Transactions on Vehicular Technology, 2017, 66(9): 7643–7652.
[13] Khawaja B A, Tarar M A, Tauqeer T, et al. A 1× 2 Triple-band Printed Antenna Array for Use in Next Generation Flying Ad-hoc Networks[J]. Microwave and Optical Technology Letters, 2016, 58(3): 606–610.
[14] Simunek M, Fontan F P, Pechac P, et al. Space Diversity Gain in Urban Area Low Elevation Links for Surveillance Applications[J]. IEEE Transactions on Antennas and Propagation, 2013, 61(12): 6255–6260.
[15] Jiang A Z, Mi Z C, Dong C, et al. CF-MAC: A Collision-free MAC Protocol for UAVs Ad-hoc Networks[C]// IEEE Wireless Communications and Networking Conference, 2016.
[16] Khan M A, Safi A, Qureshi I M, et al. Flying Ad-hoc Networks (FANETs): A Review of Communication Architectures, and Routing Protocols[C]// International Conference on Latest Trends in Electral Engineering and Computing Technologies, 2017.
[17] Oubbatia O, Lakasb A, Zhou F, et al. A Survey on Position-based Routing Protocols for Flying Ad Hoc Networks (FANETs) [J]. Vehicular Communications, 2017, 10: 29–56.
[18] Yan C X, Fu L G, Jiao D L. FIR-Based Ranging Method for OFDM Communication Systems of Networking UAVs[C]// IEEE/CIC International Conference on Communications in China, 2018.
[19] 闫朝星, 马云思, 付林罡, 等. 一种多速率OFDM测控系统的测距方法[J]. 遥测遥控, 2017, 38(2): 1–6.Yan Chaoxing, Ma Yunsi, Fu Lingang, et al. A Ranging Method for Multi-rate OFDM TT&C System[J]. Journal of Telemetry, Tracking and Command, 2017, 38(2): 1–6.
[20] 闫朝星, 付林罡, 朱至天, 等. 天基测控中无人机集群的高效随机接入技术[C]//中国通信学会卫星通信委员会, 第十四届卫星通信学术年会, 2018.
[21] 马荣, 闫朝星, 周三文,等. 一种基于并行与加窗结构的Turbo码高速译码实现方法: 中国, 201410412623.X[P]. 2014-06-18.
[22] 王希洋. 基于统计优先级的数链MAC协议研究[D]. 西安: 西安电子科技大学, 2017.Wang Xiyang. Research on Statistical Priority-based MACProtocol for Data Link[D]. Xi'an: Xidian University, 2017.
[23] 侯延顺, 孙甲琦, 王晓波. 典型群组移动模型研究[J]. 计算机科学, 2014, 41(11A): 174–177.Hou Yanshun, Sun Jiaqi, Wang Xiaobo. Research of Representative Group Mobility Models[J]. Computer Science, 2014, 41(11A): 174–177.
[24] Xie J, Wan Y, Kim J H, et al. A Survey and Analysis of Mobility Models for Airborne Networks[J]. IEEE Communications Surveys & Tutorials, 2014, 16(3): 1221–1238.
[25] Haas E. Aeronautical Channel Modeling[J]. IEEE Transactions on Vehicular Technology, 2002, 51(2): 254–264.
[26] Rice M, Dye R, Welling K. Narrowband Channel Model for Aeronautical Telemetry[J]. IEEE Transactions on Aerospace and Electronic Systems, 2000, 36(4): 1371–1376.
[27] Rice M, Davis A, Bettweiser C. Wideband Channel Model for Aeronautical Telemetry[J]. IEEE Transactions on Aerospace and Electronic Systems, 2004, 40(1): 57–69.
[28] Rice M, Palmer J, Lavin C, et al. Space-time Coding for Aeronautical Telemetry: Part I-Estimators[J]. IEEE Transactions on Aerospace and Electronic Systems, 2017, 53(4): 1709–1731.
[29] Sen I, Matolak D W. The 5-GHz Airport Surface Area Channel-Part II: Measurement and Modeling Results for Small Airports[J]. IEEE Transactions on Vehicular Technology, 2008, 57(4): 2027–2035.
[30] Matolak D W, Sen I, Xiong W. The 5-GHz Airport Surface Area Channel-Part I: Measurement and Modeling Results for Large Airports[J]. IEEE Transactions on Vehicular Technology, 2008, 57(4): 2014–2026.
[31] Takizawa K, Ono F, Suzuki M, et al. Measurement on S-band Radio Propagation Characteristics for Unmanned Aircraft Systems[C]// 8th European Conference on Antennas and Propagation (EuCAP): IEEE, 2014:3068–3072.
[32] Ono F, Kagawa T, Tsuji H, et al. Measurements on C-band Air-to-air Channel for Coexistence among Multiple Unmanned Aircraft Systems[C]// International Conference on Unmanned Aircraft Systems (ICUAS): IEEE, 2017:1160–1164.
[33] Meng Y S, Lee Y H. Measurements and Characterizations of Air-to-ground Channel over Sea Surface at C-band with Low Airborne Altitudes[J]. IEEE Transactions on Vehicular Technology, 2011, 60(4): 1943–1948.
[34] Lee Y H, Meng Y S. Empirical Modeling of Ducting Effects on a Mobile Microwave Link over a Sea Surface[J]. Radio Engineering, 2012, 21(4): 1054–1059.
[35] Omar H A, Zhuang W, Li L. VeMAC: A TDMA-based MAC Protocol for Reliable Broadcast in VANETs[J]. IEEE Transactions on Mobile Computing, 2013, 12(9): 1724–1736.
[36] Bekmezci İ, Sahingoz O K, Temel Ş. Flying Ad-hoc Networks (FANETs): A Survey[J]. Ad Hoc Networks, 2013, 11(3): 1254–1270.
[37] Tortonesi M, Stefanelli C, Benvegnu E, et al. Multiple-UAV Coordination and Communications in Tactical Edge Networks[J]. IEEE Communications Magazine, 2012, 50(10): 48–55.
[38] Orfanus D, de Freitas E P, Eliassen F. Self-organization as a Supporting Paradigm for Military UAV Relay Networks[J]. IEEE Communications Letters, 2016, 20(4): 804–807.
[39] Li J, Zhou Y F, Lamont L. Communication Architectures and Protocols for Networking Unmanned Aerial Vehicles[C]// IEEE Globecom Workshops (GC Wkshps): IEEE, 2013: 1415–1420.
[40] Liu Y, Jin H, Yu Q, et al. Research on Transmission Waveform Structure and Rate Scaled of New Generation Data Link[C]// 4th International Conference on Information Science and Control Engineering (ICISCE): IEEE, 2017: 1686–1689.
[41] Yang J, Boyd J, Laney D, et al. Next Generation Half-duplex Common Data Link[C]// IEEE Military Communications Conference (MILCOM): IEEE, 2007: 1–7.
A Survey on UAV TT&C Ad Hoc Networking Techniques
Abstract: During the building of Space-Ground Integrated Information Network, multiple-UAV (Unmanned Aerial Vehicle) TT&C communication and networking could extend the operation area and improve the system survivability. This treatise commences with the introduction of the UAS (Unmanned Aircraft System) concept, taxonomy, military products and development prospect in civilian application. Then we analyze the state of the art, the modeling and the architecture of UAV Ad-Hoc network. Finally we analyze the typical USA and NATO military airborne datalink systems. This paper is devoted to providing insights on UAV communication networks to facilitate further system development.
Key words: UAV communication; TT&C; Ad hoc network; Data link
中图分类号:TN929.5
文献标识码:A
文章编号:CN11-1780(2018)04-0066-09
翟中英 1968年生,硕士,高级工程师,主要研究方向为测控通信信号与信息处理。
闫朝星 1985年生,博士,高级工程师,主要研究方向为无人机数据链与卫星通信网络系统。
Email:ycyk704@163.com TEL:010-68382327 010-68382557




往期热文(点击文章标题即可直接阅读):





