
近年来,人工智能经历了巨大的发展和成熟,但自主系统在各种未知环境中的应用历来困难重重。DARPA 正寻求通过 "地下挑战 "项目改变这一现状,为机器人专家提供在复杂和高风险的地下场景中为民用和军用急救人员提供支持的机会。地下领域面临着诸多挑战,如有限的通信、多样的拓扑和地形以及感知能力下降等。MARBLE 团队提出了一种自主探索未知地下环境的解决方案,其中协调智能体搜索感兴趣的人工制品。该团队提出了两种导航算法,一种是基于度量拓扑图的规划器,另一种是基于连续前沿的规划器。为促进多智能体协调,各智能体共享并合并新的地图信息和候选目标点。智能体在环境中的不同点部署通信信标,扩大了共享地图和其他信息的范围。机载自主功能减轻了人类监管人员的负担,使智能体能够检测和定位人工制品,并在已建立的通信网络之外进行自主探索。考虑到这一挑战的规模、复杂性和节奏,吸取了一系列经验教训,其中最重要的是,在具有代表性的环境中进行频繁而全面的实地测试是快速完善系统性能的关键。
框架
要在 DARPA 地下挑战赛中取得成功,智能体必须具备多种不同的能力。为了得分,它们必须能够检测和分辨各种人工制品,在环境中相对于固定的世界帧进行定位,并将这些信息反馈给基站,以便最终提交给 DARPA。RGB 图像由 YOLO(Redmon 等人,2016 年)处理,YOLO 会在物体周围生成一个边界框,并估算出置信度分数。通过将边界框的中心与相应的对齐深度测量值进行融合,可获得工件的局部投影。然后,利用机器人当前的状态估计值,将投影转换到固定的世界帧中。在不同阶段,我们学到了很多关于开发灵活物体检测系统的知识,我们将在第 9.1 节中讨论这些知识。
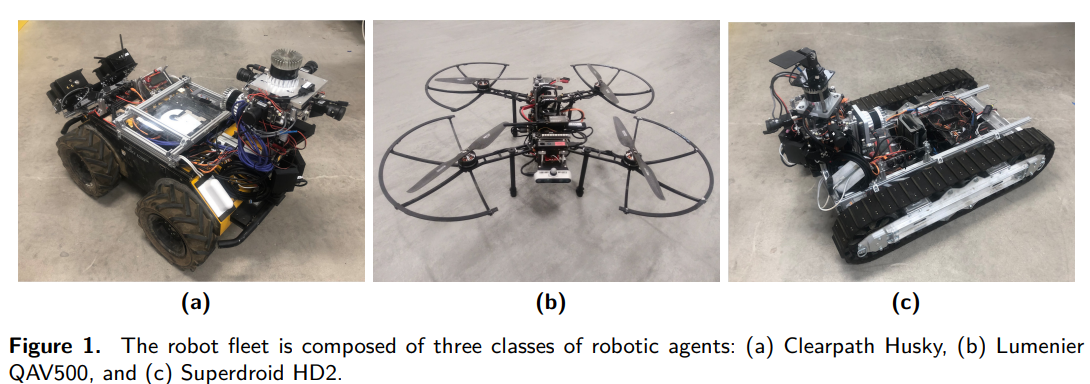
每个机器人都要进行物体融合,以汇总该机器人的单个检测结果。基站会将所有机器人的工件报告合并为一份报告。在人工提交之前,位置和类型相似的人工制品会被合并。人工监督员可以查看文物报告图像以及机器人的地图和里程计,从而在提交最终报告前对文物位置或分类进行人工修正。文物报告通过可部署的 WiFi 网状网络传输,同时还传输地图片段、全球机器人位置和其他用于多智能体协调的有用信息。基站并不充当中心智能体,但它可以像其他智能体一样在机器人之间传递信息。
制图、导航和工件定位等关键的自主进程都依赖于准确可靠的状态估计。车队一直依赖于谷歌的 Cartographer(Hess 等人,2016 年),它使用激光雷达扫描匹配进行局部里程测量,并通过全局环路闭合进行扫描到子地图的优化,以校正漂移。尽管其他激光雷达-惯性 SLAM 算法具有更高的精度,如 LOAM(Zhang 和 Singh,2017 年),但 Cartographer 还是因其实时闭环漂移校正、易用性和详尽的文档而被选中。
优化目标点选择和到达目标点的路径对于提高探索效率至关重要。我们的团队开发了定制解决方案,用于选择新的目标点,并根据每个电路环境的预期拓扑结构导航到这些目标点。隧道赛道采用了基于图形的导航和探索策略。城市赛道和洞穴赛道的环境在空间上比隧道环境更为复杂,因此我们开发了一种更全面的基于前沿的探索算法。第 4 节和第 5 节将详细讨论这些解决方案。为了绘制环境地图,地面机器人使用开源软件包 octomap(Hornung 等人,2013 年)生成世界的概率占位网格表示法。为了支持我们的多智能体解决方案的需要,我们在 octomap 软件包中增加了地图合并等功能,第 3 节将对此进行讨论。
其中一些流程,如定位、全局规划和伪装检测,只需稍作调整即可同时用于空中和地面平台。但是,低级子系统是单独设计的。空中飞行器使用 Voxblox(Oleynikova 等人,2017 年)生成环境的欧几里得符号距离场表示,这对于生成与障碍物有足够间隙的路径非常有用。除了水平 Ouster 激光雷达之外,无人机还使用了向上和向下的深度传感器进行测绘。这种设置增加了垂直方向的体积信息增益,这对穿越竖井和楼梯至关重要。无人驾驶飞行器还有一个专门为 3D 导航开发的不同的本地规划解决方案,该方案以深度图像空间内的规划为基础。直接在传感器帧中检测障碍物在很大程度上可以避免测绘和定位的不确定性,从而在沿路径飞行时提供额外的安全保障。第 6 节将对此进行更详细的讨论。
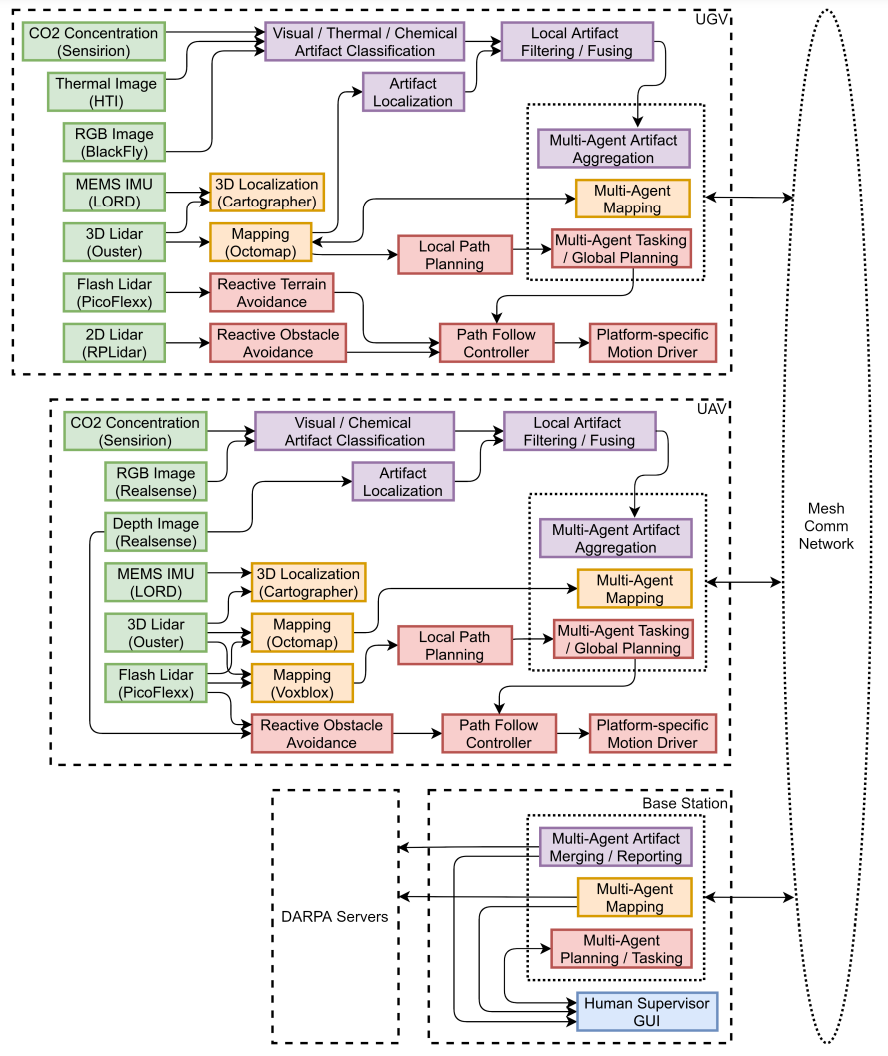
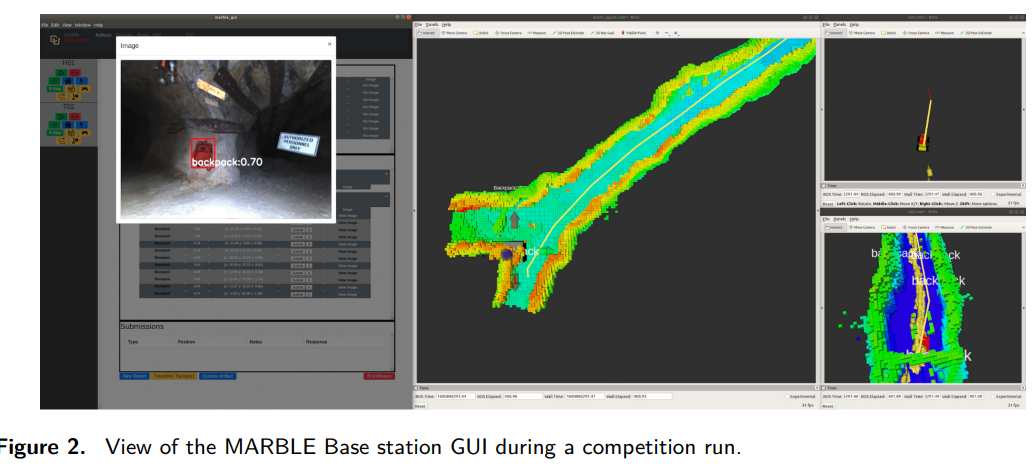
图 3. 地面平台、空中平台和基站软件管道概览。绿色为数据源,紫色为工件检测流程,橙色为定位和绘图流程,红色为导航流程,蓝色为操作流程。
