
异构多智能体系统为解决农业、军事、装配和仓库自动化等不同领域的复杂问题提供了可能,否则单个智能体是无法解决这些问题的。要有效部署异构多机器人团队,研究必须解决不同抽象程度的四个问题:任务规划(是什么)、运动规划(如何)、任务分配(谁)和调度(何时)。这些问题高度相互依存,先前的工作已经证明,利用这些问题的单个解决方案之间的协同作用的系统可以提高多机器人协调的效率和效益。
本文研究了在多智能体组队应用中使用基于特质的模型来表示单个智能体,以及如何利用基于特质的建模来实现更稳健、更高效的多智能体联盟组建解决方案。具体来说,我们研究了如何在联盟组建算法中使用这些技术来回答任务分配、调度、运动规划和任务规划这四个问题。
我们的研究表明,利用基于机器人和任务特质建模的算法可以在异构多机器人团队中实现高效的协调,并且在时间进度、分配质量和计算效率方面优于现有方法。本论文的贡献如下:
-
创建一个建模框架,使现代任务分配算法能够推理动态特征。通过使用基于转换的建模框架,我们创建了对以往基于特质的建模技术的扩展,以更好地推理智能体的特质如何随时间变化。
-
为异构多机器人系统开发基于时间扩展特质的任务分配和路径规划统一框架。我们引入了一种基于搜索的方法,用于基于特质的时间扩展任务分配和运动规划,命名为增量任务分配图搜索(ITAGS)。
-
整合任务规划、任务分配、调度和运动规划的新型多机器人协调问题的形式化和解决方案。我们形式化了一类新的多机器人协调问题,该问题融合了这些问题中的每一个,并提出了一种解决方案(图形递归同步任务分配、规划和调度(GRSTAPS))。
-
为 ITAGS 的动态变体创建框架,该变体能够进行基于特征的任务分配修复: 我们对 ITAGS 进行了扩展,使用基于特质的动态时间扩展任务分配算法,如果智能体的特质或任务要求在执行过程中发生变化,该算法可以修复任务分配。
-
创建一个主动学习框架,用于学习多智能体任务分配问题的特质要求: 由于理解一个联盟的特质与该联盟在特定任务中的表现之间的关系可能具有挑战性,因此我们提出了一种主动学习框架来学习任务与特质之间的关系。此外,我们还提供了一种新的时间扩展任务分配算法,该算法能够优化学习到的质量模型。
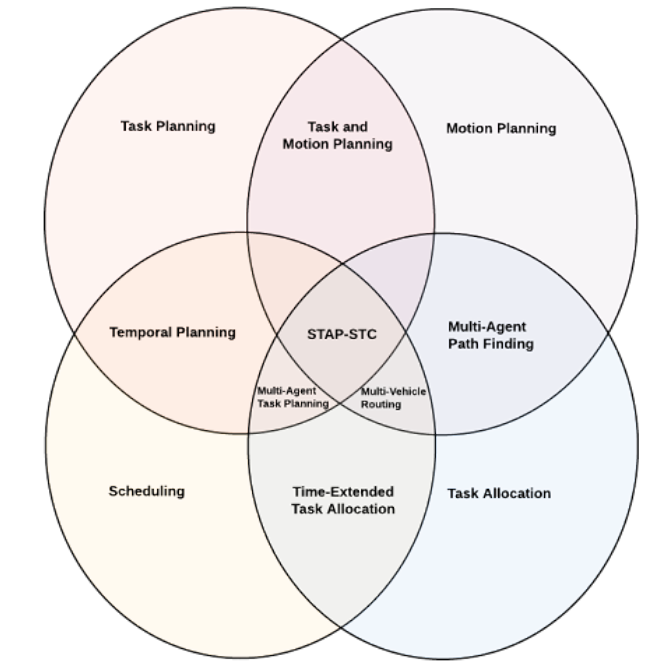
图 2.1: 显示各种多机器人协调问题交叉点的维恩图。

