
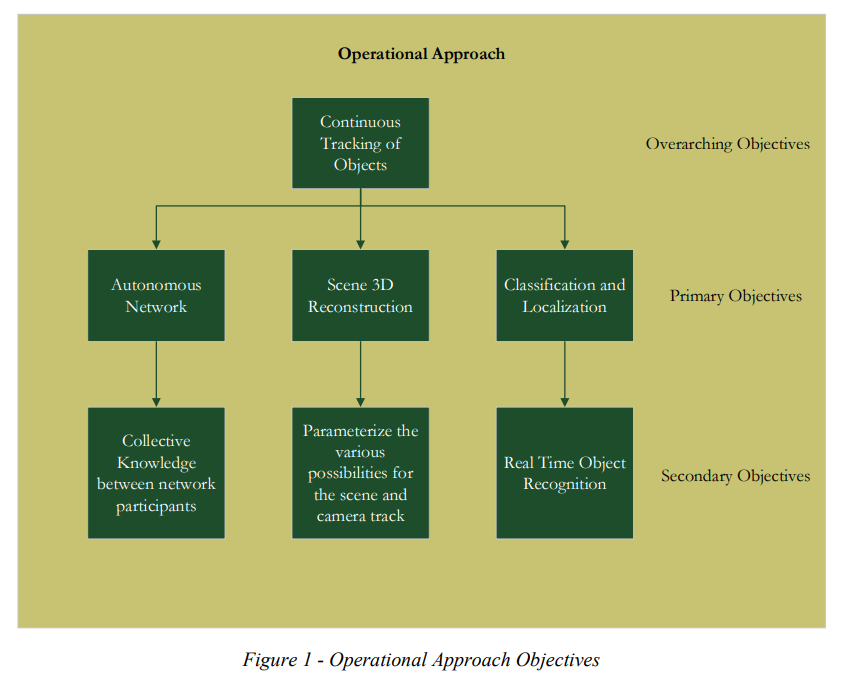
过去几十年来,在安全、监视、情报收集和侦察等许多领域,对目标跟踪(OT)应用的需求一直在增加。最近,对无人驾驶车辆新定义的要求提高了人们对 OT 的兴趣。机器学习、数据分析和深度学习的进步为识别和跟踪感兴趣的目标提供了便利;然而,持续跟踪目前是许多研究项目感兴趣的问题。本文提出了一个系统,实现了一种持续跟踪目标并根据其先前路径预测其轨迹的方法,即使目标在一段时间内部分或完全被隐藏。该系统分为两个阶段:第一阶段利用单个固定摄像机系统,第二阶段由多个固定摄像机组成的网状系统。第一阶段系统由六个主要子系统组成:图像处理、检测算法、图像减法器、图像跟踪、跟踪预测器和反馈分析器。系统的第二阶段增加了两个主要子系统: 协调管理器和相机控制器管理器。这些系统结合在一起,可以在目标隐藏的情况下实现合理的物体连续性。
成为VIP会员查看完整内容
相关内容

Arxiv
42+阅读 · 2023年4月19日
Arxiv
224+阅读 · 2023年4月7日
Arxiv
152+阅读 · 2023年3月29日
Arxiv
85+阅读 · 2023年3月21日


相关VIP内容
相关资讯
相关论文
Arxiv
42+阅读 · 2023年4月19日
Arxiv
224+阅读 · 2023年4月7日
Arxiv
152+阅读 · 2023年3月29日
Arxiv
85+阅读 · 2023年3月21日