
多智能体机器人技术有望塑造工业的未来,有可能改变日常生活的许多方面。在未来十年中,它们预计将对运输系统、军事应用(如侦察和监视、搜救行动或太空任务)产生影响,并为急救人员提供支持。
在机器人领域最新发展的推动下,随着新一代多智能体机器人系统变得更加智能、精确,应用领域也更加多样化,本论文将为这些系统的发展做出贡献。但是,为了实现这些目标,组成合作机器人系统的各个智能体需要在确保准确性和保留执行多样化任务能力的同时,对它们所能完成的任务进行专业化。
本论文在考虑单个智能体专业化能力的特定背景下,探讨了蜂群机器人技术中的任务分配问题。基于每个智能体都拥有专门的功能能力,以及分布在周围环境中的预期任务提出了特定要求的假设,提出的任务分配机制在两个不同的空间中制定。首先,团队成员专业化的初级形式被表述为嵌入智能体动力学控制空间的合作控制问题。其次,定义了智能体专业化的高级表述,在专用的专业化空间中估计单个智能体的任务分配概率,这是本论文对蜂群机器人领域的进步和实践的核心贡献。
在专业化空间中制定的原始任务分配过程经历了四个发展阶段。首先,从概念上引入了任务特征识别阶段,利用嵌入在智能体中的传感层的输出来驱动所提出的任务分配方案。其次,制定匹配方案,将每个智能体的专业能力与相应的检测任务进行最佳匹配。在这一阶段,智能体专业化的一般二进制定义是任务-智能体关联的基础。第三,将任务-智能体匹配方案扩展为创新的基于概率专业的任务-智能体分配框架,以推广这一概念并挖掘智能体专业化考虑的潜力。第四,根据智能体的机械、物理结构和嵌入式资源对其专业化进行调制定义,进一步完善了总体框架。此外,还对原有框架进行了扩展,并引入了优先级层,以提高系统对复杂任务的响应能力,这些复杂任务的特点是基于对多个类别的识别。
在模拟和实际实验中对所提出的基于专长的任务分配方法进行了实验验证,并结合潜在应用对结果进行了介绍和讨论,以证明所提框架的有效性和效率。
这项工作旨在填补以往解决机器人群个体专业化问题的工作中的技术空白。本论文的成果通过开发一个创新框架,利用传感能力来支持智能体之间专业化的概念化和实施,从而推动了蜂群机器人领域的发展。重点在于定义单个智能体的专长,并根据每个任务的特定约束条件,将其与这些单个智能体所要掌握的任务相匹配。为此,本研究打算回答以下研究问题:
问题 1:一群智能水平相对较低的机器人如何完成复杂的任务,这些任务需要单个机器人代理的专业化?
过去二十年来,多智能体系统的合作编队控制受到了研究人员的极大关注。本论文以文献综述(第 2 章)中提到的方法为基础,提出了一种解决方案,以填补机器人团队中单个成员专业化方面的研究空白。本论文的重点是通过利用智能体的非同质性来增强蜂群的能力。为此,本论文扩展了合作蜂群的概念,并提出了一个严格的流程来利用单个智能体之间的专业异质性。
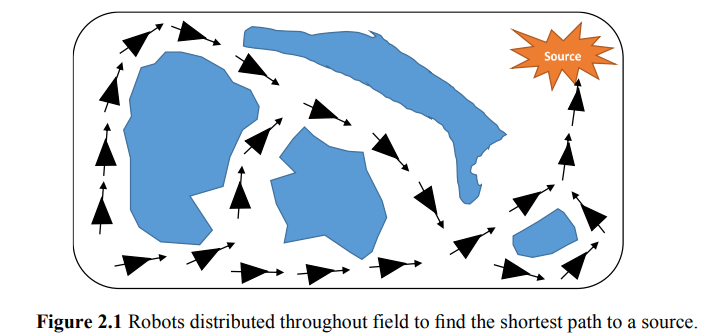
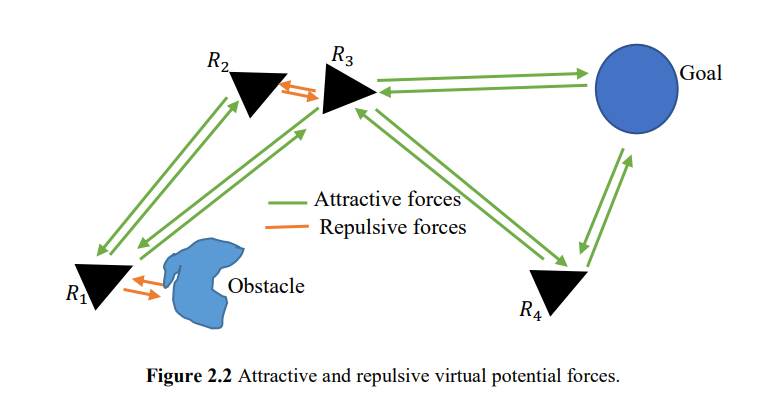
为了回答问题 1,我们首先进行了一项早期调查,以验证这一概念。这一过程将机器人团队工作空间的不同区域定义为分配给不同任务的独立区域。所开发的解决方案可让机器人顺利安全地切换位置,并根据每个访问区域要执行的特定任务动态调整整体队形。它定义了如何在每个区域管理机器人群的编队。作为一种初级的专业化形式,当智能体从一个区域转移到另一个区域时,该框架会将智能体的领导角色从一个智能体切换到另一个智能体。在第一阶段的研究中,假定一个特定的智能体(即蜂群中的一个成员)是每个区域中唯一专门执行领导任务的智能体。在任务完成之前,该智能体被指定为相关区域的专门领导者。第一部分研究的详细情况将在第 3.4 节中报告。
问题 2:能否对最初的方法进行升级,让专业化个体从环境中的自动目标识别中获益,能否让智能体之间的合作变得足够稳健和灵活,以便在发现目标后自动将适当的专业化智能体分配到相应的任务中?
为了回答这个问题,我们进一步扩展了原有的协调系统,用于在专用机器人之间分配基于任务的领导权。通过对分布在机器人群工作空间中的专业化影响区域的定义进行演化,对问题进行了重新表述。受早期编队方法的启发,出现了一种有趣的解决方案。从使用机载传感器自动识别工作区目标的假设出发,选择有资格执行识别任务的智能体的过程应逐步经历三个基本状态,分别称为搜索状态、任务状态和执行状态。这种方法还可扩展到目标移动时的动态影响区域,以及多个任务共享同一区域时的动态影响区域。这更好地反映了移动机器人的实际干预场景。这方面的工作将在第 3.5 节中报告。
问题 3:为了改进蜂群的管理,能否根据智能体的专业化程度,在一定程度上适合响应给定任务的概率匹配机制中,适当定义和制定每个智能体的专业化功能?
为了解决这个问题,可以利用基于概率的建模来完善用于实现单个智能体角色专业化的框架设计。建立这样一种智能体行为的概率表征,可以形成一种可扩展的机制。后者支持自动化流程,能够处理任务和专业化定义中的不确定性,并应对任务约束和智能体能力之间的不完美匹配。所提出的智能体选择方案是根据任务识别的置信度和特定智能体满足任务特定要求的概率来制定的。所提出的基于专业的任务分配方案旨在根据所识别的任务约束条件,计算蜂群中各个智能体的匹配适合度,即任务-智能体专业匹配概率。本框架的开发过程详见第 4.3 和 4.4 节。
问题 4:提议的框架能否应用于实际系统?
为了证明所提方法的有效性及其在现实世界中的应用潜力,我们从两个方面对其进行了测试。首先,在仿真中对所提出的框架进行验证,以证明其有效性。第 5 章介绍了大量的模拟实验。然后,作为案例研究介绍了拟议方法的潜在应用,同时详细介绍了拟议框架在真实机器人平台上的实施情况,以验证和检验基于专业的任务分配方案在实现预期协调水平方面的性能。这项工作将在第 6 章中介绍。
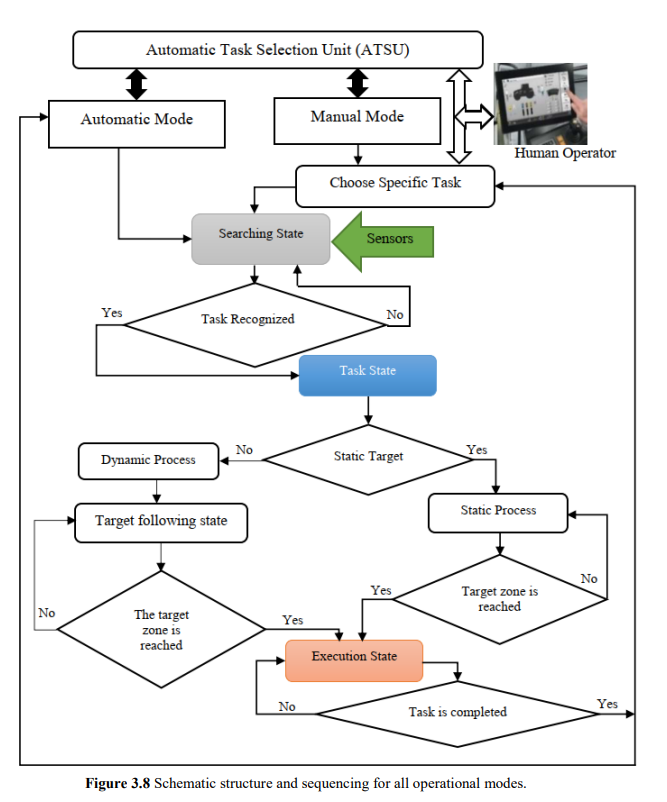
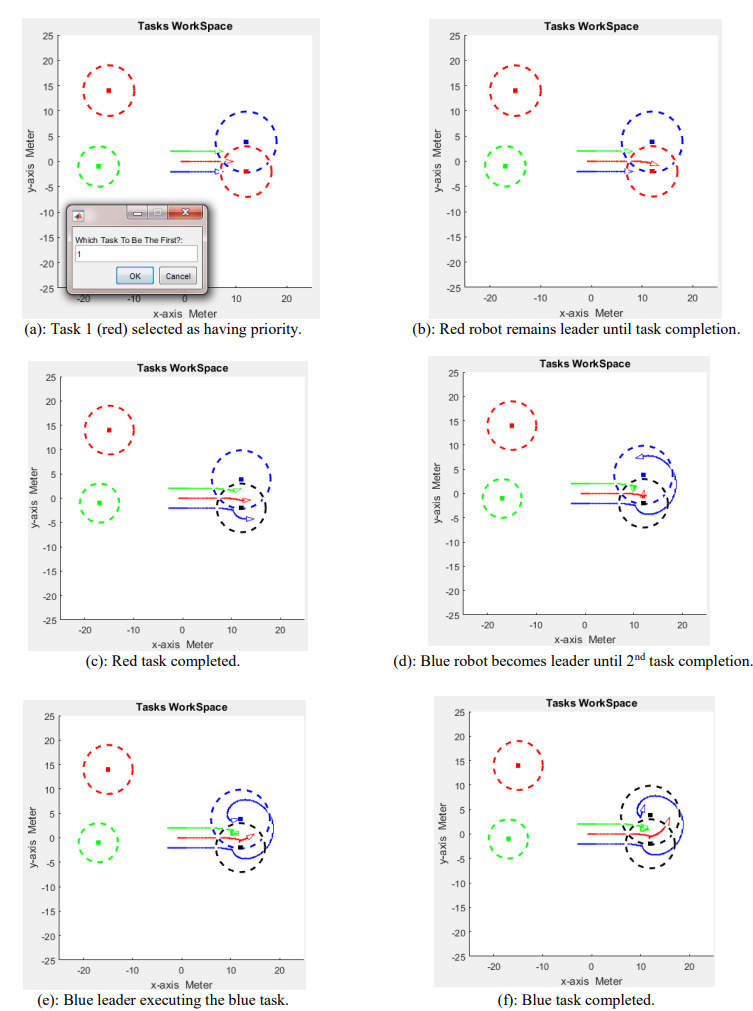

图 3.12 任务执行的先后顺序:(a-c)影响区重叠,操作员选择任务 1(红色)为优先任务,这促使红色机器人继续担任领导者,直到红色任务完成;(d-f)第二优先任务(蓝色)正在执行,蓝色机器人转为领导者位置;(g-h)蜂群恢复到影响区重叠外的搜索状态,然后搜索其他任务(绿色,然后是红色),由相应的领导者机器人执行。

