近年来,机器人领域发展迅速,机器人被用于越来越多的应用中,从制造业到医疗健康再到家务劳动。机器人技术的关键挑战之一是使机器人能够在非结构化和动态环境中执行复杂的操作任务。虽然机器人学习和控制已经取得了重大进展,但许多现有方法受到限制,因为它们依赖于预定义的运动基元或通用模型,而这些模型没有考虑到个人用户、其他合作智能体或交互对象的特定特征。为了在这些不同的环境中有效地工作,机器人需要能够适应不同的任务和环境,并与不同类型的智能体进行交互,如人类和其他机器人。本论文研究学习方法,使机器人能够适应他们的行为,以实现智能机器人行为。
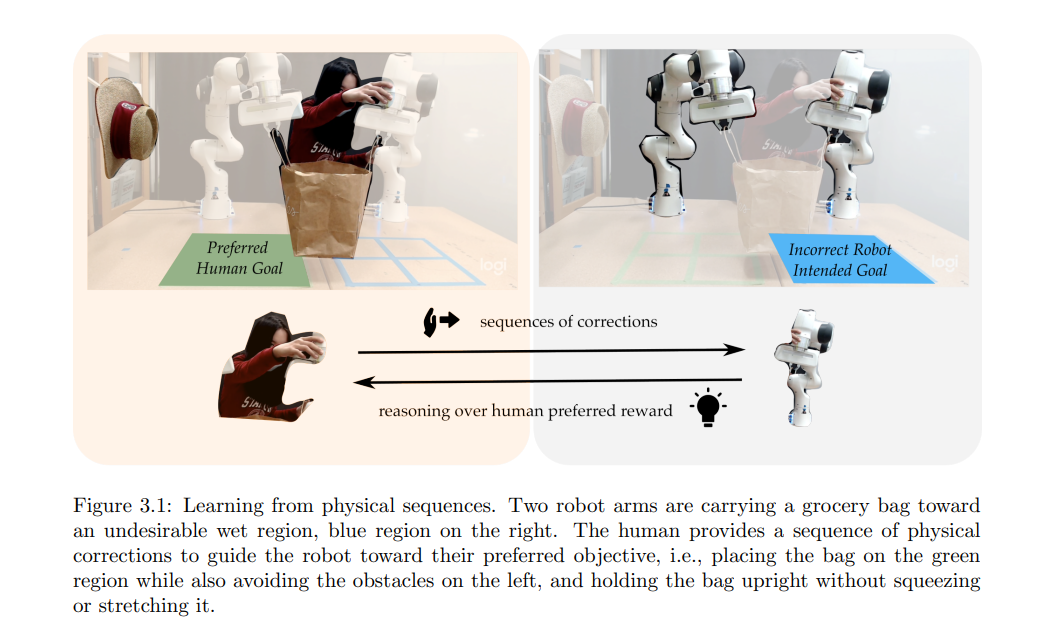
在本文的第一部分中,我们专注于使机器人更好地适应人类。我们首先探索如何利用不同的数据源为人类用户实现个性化。研究了人类如何喜欢用低维控制器(如操纵杆)遥控辅助机器人手臂。本文提出一种算法,可以有效地开发辅助机器人的个性化控制。这里的数据是通过最初演示机器人的行为,然后询问用户以从操纵杆收集他们相应的首选遥操作控制输入来获得的。探索了利用较弱的信号来推断智能体的信息,如物理修正。实验结果表明,人工修正是相互关联的,共同推理这些修正可以提高精度。最后,研究了机器人如何通过推理和利用团队结构更有效地与人类团队合作和影响人类团队,而不是只适应单个人类用户。将该框架应用于两种类型的群体动力学,即领导-跟随和捕食者-被捕食者,并证明机器人可以首先开发一种群体表示,并利用这种表示成功地影响一个群体以实现各种目标。
在本文的第二部分,我们将研究范围从人类用户扩展到机器人智能体。本文解决了分散的机器人团队如何通过只观察其他智能体的行动来相互适应的问题。本文发现了团队中存在无限推理循环的问题,并通过为机器人智能体分配不同的角色,如"发言人"和"听众",提出了解决方案。这种方法使我们能够将观察到的行动视为一个沟通渠道,从而实现分散团队内的有效协作。在本文的第三部分,我们探讨了如何通过开发定制的工具来适应不同的任务。强调了工具在确定机器人如何与物体交互方面的关键作用,使它们在为特定任务定制机器人方面变得重要。为解决这个问题,本文提出一个端到端的框架,通过利用可微物理模拟器来自动学习富接触操作任务的工具形态学。最后,对全文进行了总结,并对未来的研究方向进行了展望。