
载人与无人飞行器常在地面雷达系统探测范围内执行任务。对于特定应用场景,规避探测风险是任务规划的核心考量。探测风险受多种因素影响,包括飞行器位姿(即位置与朝向)、飞行器雷达散射截面(RCS)、雷达位置及雷达参数。当前雷达探测应用中的路径规划算法默认这些因素为确定且已知量,但实际应用中这些参数均为估计值且存在显著不确定性。本研究旨在探索如何将此类不确定性纳入路径规划算法。
方法框架
本研究通过量化探测风险及其变异度、建模探测要素的不确定性,并将这些成果集成至路径规划器实现目标。探测风险采用探测概率(PD)的近似值量化,该概率针对飞行器位姿、雷达位置及雷达参数进行线性化处理。线性化模型用于估计由上述不确定性引发的PD方差。假设雷达位置与参数的不确定性恒定,飞行器位姿不确定性则通过惯性导航滤波器估算。为实现快速路径评估,本文提出一种解析方法,可沿候选路径生成标称飞行器位姿与惯性测量单元(IMU)数据,作为惯性导航滤波器的输入。
系统集成
融合不确定性雷达模型与高效位姿/IMU数据生成器,构建改进型可视性图谱路径规划器。该规划器将PD方差纳入路径有效性检验体系,并采用飞行器动力学的线性协方差模型,快速生成误差预算,为任务规划者提供关于不确定性源的可操作信息。
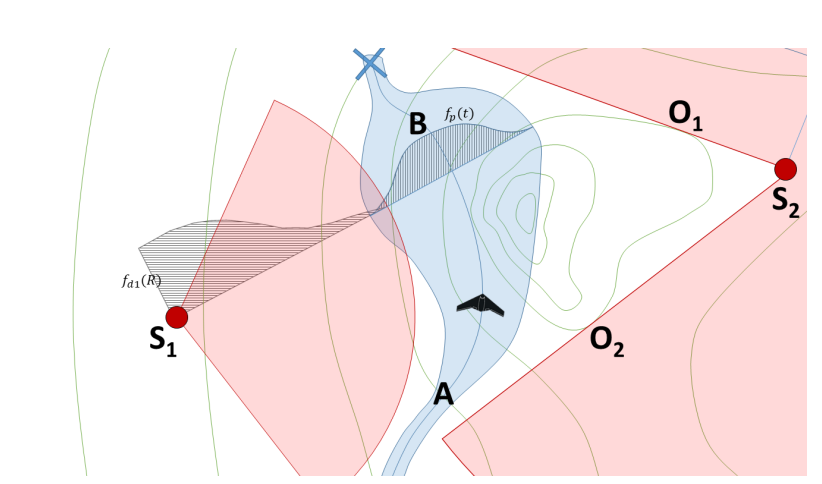
图1.1:一架无人机飞越配备两个雷达传感器(S1、S2)区域的示例。简化的探测区域以红色显示。路径周围的蓝色区域表征导航状态不确定性。检测统计量的分布与导航不确定性分别覆盖于对应区域。导航状态不确定性沿飞行路径递增,表征全局定位测量精度的衰减。
成为VIP会员查看完整内容
相关内容

Arxiv
210+阅读 · 2023年4月7日
Arxiv
87+阅读 · 2021年10月21日
Arxiv
23+阅读 · 2021年9月20日
Arxiv
23+阅读 · 2020年8月10日

相关VIP内容
相关资讯
相关论文
Arxiv
210+阅读 · 2023年4月7日
Arxiv
87+阅读 · 2021年10月21日
Arxiv
23+阅读 · 2021年9月20日
Arxiv
23+阅读 · 2020年8月10日