美国国防部《图论在建模、仿真、分析OODA环路和信任中的应用:量化任务的成功率》30页报告
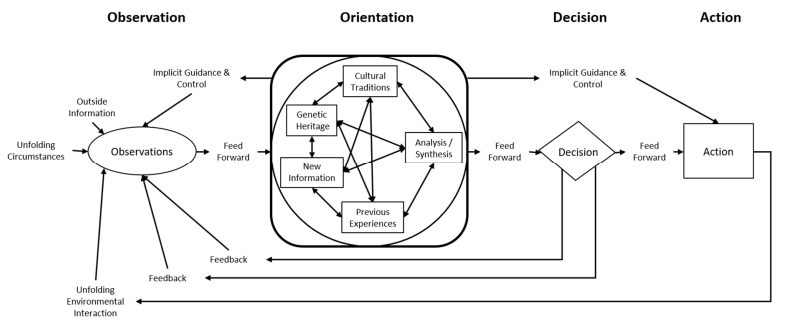
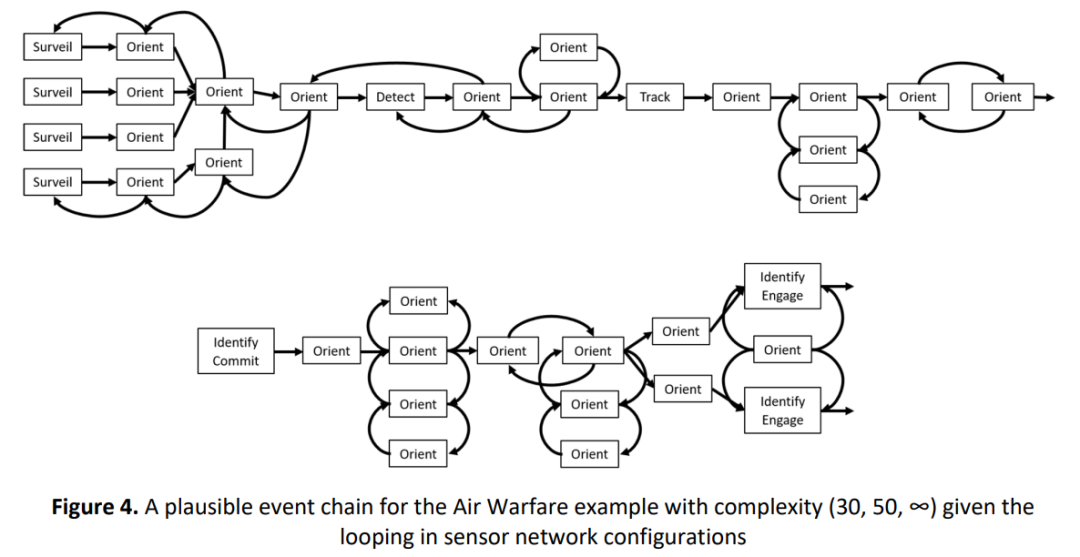
任务工程是对一个系统体系(SoS)应用的效果进行量化,以实现可衡量的预期效果。一个任务可以受到动态环境的制约或受益。环境被定义为背景的一个子集,只占许多条件中的一个,这些条件既有助于定义,也能改变任务的执行。任务的执行是由任务线程定义的;也就是由子系统执行的行动/过程序列组成。通常情况下,有许多合理的任务线程可以被执行。任务线程可以被分解为事件链。一个事件链是一个具有可量化结果的"短"事件序列。
专知便捷查看
便捷下载,请关注专知公众号(点击上方蓝色专知关注)
后台回复“GT30” 就可以获取《美国国防部《图论在建模、仿真、分析OODA环路和信任中的应用:量化任务的成功率》30页报告》专知下载链接
欢迎微信扫一扫加专知助手,咨询使用专知,获取最新AI专业干货知识教程资料!




登录查看更多
相关内容
Arxiv
0+阅读 · 2022年9月13日
相关VIP内容
相关资讯