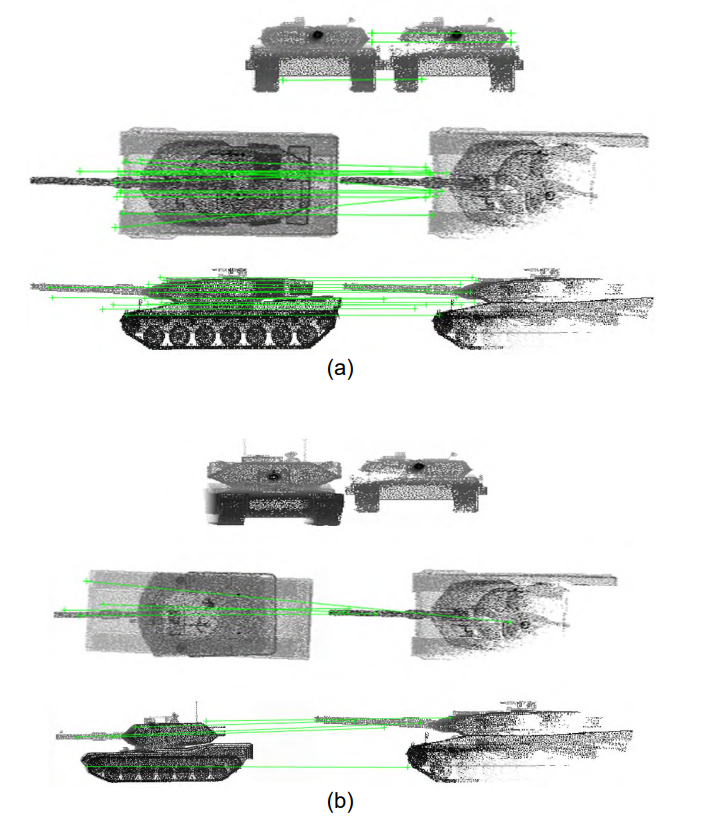
图 3- 15 (a) 相同 MBT 类别之间的 SPR 匹配关键点 - 28 个匹配点;(b) 不同 MBT 类别之间的 SPR 匹配关键点 - 9 个匹配点(从上到下依次为 fxy、fxz、fyx 平面)。对于每个平面,左侧点云代表模板,右侧代表目标(图片来自 [20])
对军用自动目标识别(ATR)程序的追求源于减少附带损害和自相残杀的需求。虽然目前已有具备二维自动识别能力的导弹,但未来具备三维自动识别能力的光探测与测距(激光雷达)导弹将大大提高导弹在复杂战场上的效能。这是因为三维 ATR 可以对目标的基本结构进行编码,从而加强目标识别能力。然而,目前用于目标识别的军用级三维 ATR 或军用计算机视觉算法并不是基于激光雷达的 ATR 导弹的最佳解决方案,这主要是由于导弹在计算和内存(存储方面)方面的限制。
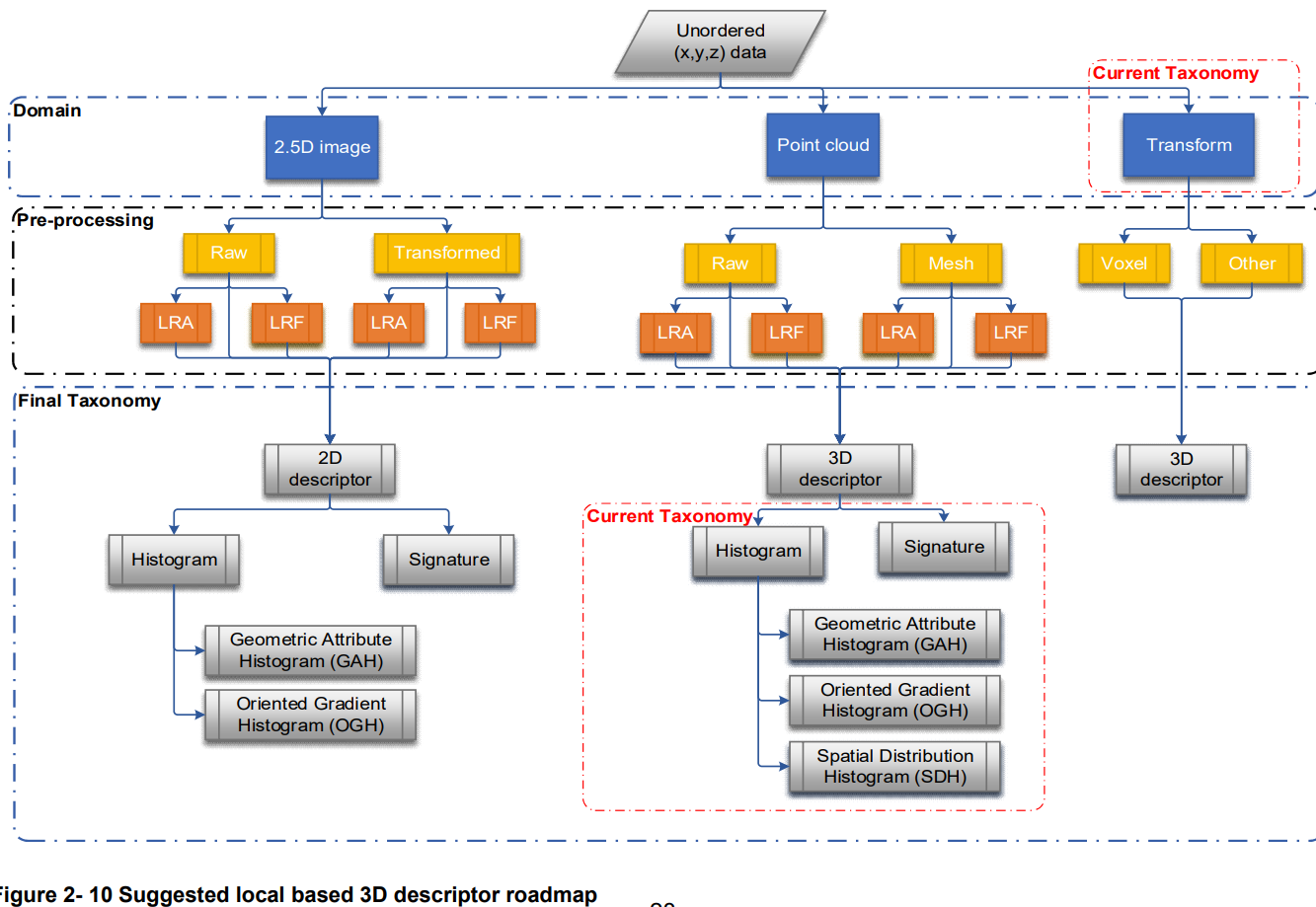
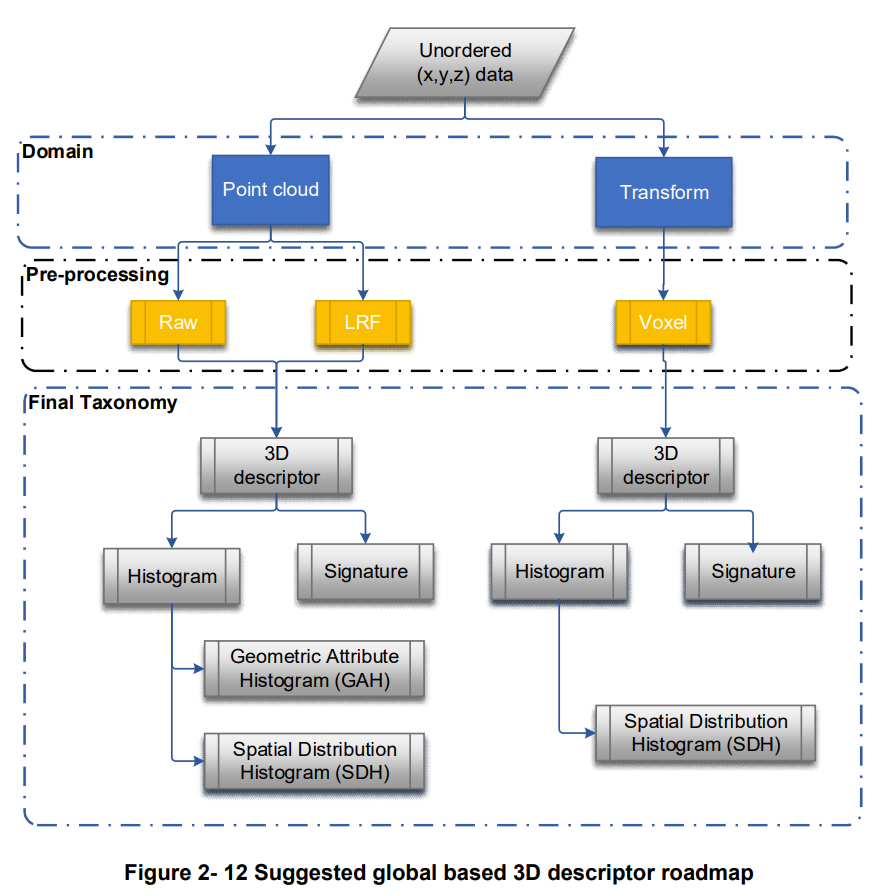
因此,本研究初步引入了局部和全局描述符域的三维描述符分类法,能够实现每个潜在选项的处理成本。通过这些分类法,可以确定每个域的最佳导弹导向描述符,从而进一步确定本论文的研究路线。
在适用于导弹的三维描述符方面,本论文的贡献是一个基于三维全局的描述符和四个基于三维局部的描述符,即 SURF 投影识别 (SPR)、距离直方图 (HoD)、高效处理变体 (HoD-S) 和二进制变体 B-HoD。在标准商业数据集以及高度可信的模拟空对地导弹交战场景(考虑了各种平台参数和干扰,包括模拟尺度变化和大气干扰)上,这些描述符与当前最先进的三维描述符进行了比较。
在不同数据集上获得的结果表明,计算速度有了显著提高,平均比文献中的先进技术快 x19 倍,同时保持甚至在某些情况下提高了检测率,正确分类目标的检测率最低达到 90% 以上。
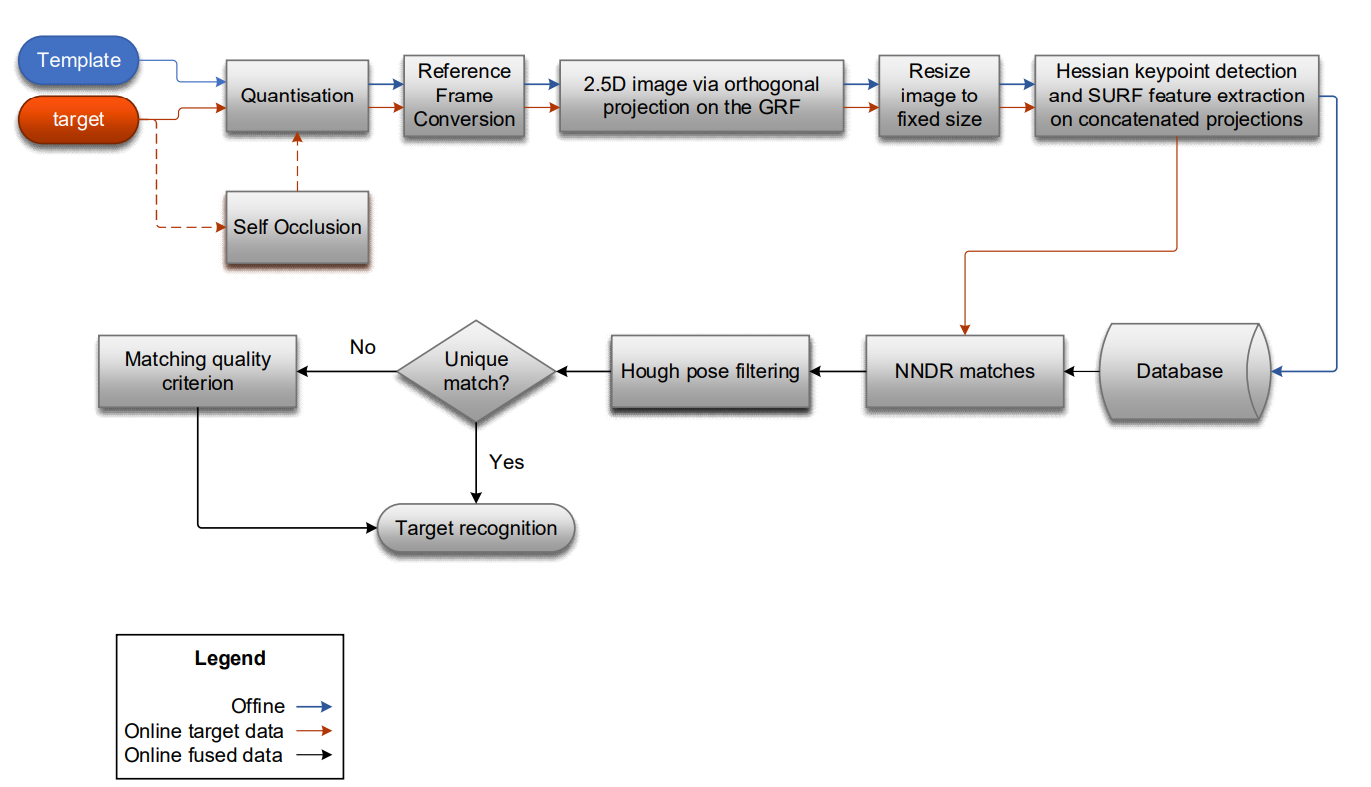
图 3- 14 SPR 目标识别算法流程图。根据场景的性质(真实场景或合成场景),可选择自闭过程(图片来自[20])。
自第二次世界大战引入导弹以来,导弹经历了从 V1 型导弹到当代国防工业生产的各种导弹的快速演变。无论是反舰导弹、反坦克导弹还是空对空导弹,所有导弹都有一个共同的目标:与预定目标交战,实现目标杀伤。如果目标没有遮挡、不杂乱且姿态不变,导弹很容易以很高的概率击中目标。然而,在现实场景中,这并非易事,因为杂波和非目标物体会在导弹的视场(FoV)内遮挡目标。目标会做出规避动作试图逃脱,因此,无论是否使用反制措施,目标都会不断改变其对导弹寻的器的姿态。除了上述具有挑战性的任务外,导弹本身的超高速飞行也进一步加剧了正确目标捕获和快速数据处理过程的复杂性。
本论文研究了利用计算机视觉概念为未来导弹平台实施三维自动目标识别(ATR)的潜力。获取目标数据的导弹传感器,即导弹寻的器,被认为是一种光探测和测距(LIDAR)设备,可为三维自动目标识别(ATR)算法提供传感器 FoV 范围内所有物体的原始几何坐标(x,y,z)。
从广义上讲,军用 ATR 可与商业应用中的物体识别过程相关联。尽管计算机视觉领域已经涉及到三维物体识别,但目前最先进的三维方法在军事环境中仍不理想。这是因为导弹必须在不利的、动态变化的和非结构化的战场环境中工作,而这种环境具有严重的失真(噪声)、杂乱和遮蔽性。这种受限的操作环境特征以及有限的处理时间和硬件技术进一步阻碍了在导弹系统上实施简单的计算机视觉算法。此外,军事应用可能涉及人员伤亡甚至自相残杀,因此必须具备较高的目标识别性能,这就要求研究界进一步关注当代 ATR 问题。
虽然这项研究旨在为未来的智能导弹系统开发轻量级三维描述符,但本文提出的概念也适用于各种非军事时间关键型三维目标识别应用。可以说,所提出的三维描述符和 ATR 架构适用于太空、空中和地面环境中大量时间要求严格的复杂系统,一般来说,也适用于执法和研究机构。测试试验显示了所开发技术在各种场景下的性能,难度依次递增。所建议的解决方案假定事先对情景一无所知。
本文贡献
这项研究的贡献在于
a. 为每个主要描述符类别(即本地描述符类别和全球描述符类别)建立三维描述符分类法。前者的贡献在于利用数据来源和通常所需的预处理阶段等信息对现有分类标准进行了修正,而对于基于全局的描述符类别,目前的文献并未提出任何分类标准。因此,这项工作建议按照本地描述符分类法的架构和原理建立一个完整的分类法。
b. 基于范围图像的描述符,将三维引入多二维 ATR 问题解决算法,利用成熟的二维物体识别领域的概念。
c. 基于三维全局的描述符,将统计分析与雷达理论和三维到多二维 ATR 问题解决概念相结合。
d. 三个三维局部描述符,处理效率高,存储要求低。其中两个是浮点型,另一个扩展到二进制域。
e. 扩展标准计算机视觉 3D ATR 架构,以满足基于导弹的 3D ATR 要求,该架构依赖于单一模板方案。
f. 以导弹为导向的三维 ATR 调查,在模拟但高度可信的空对地导弹交战场景中评估当前和建议的三维描述符,导弹处于不同的倾斜度、与目标的距离和大气扰动下。