
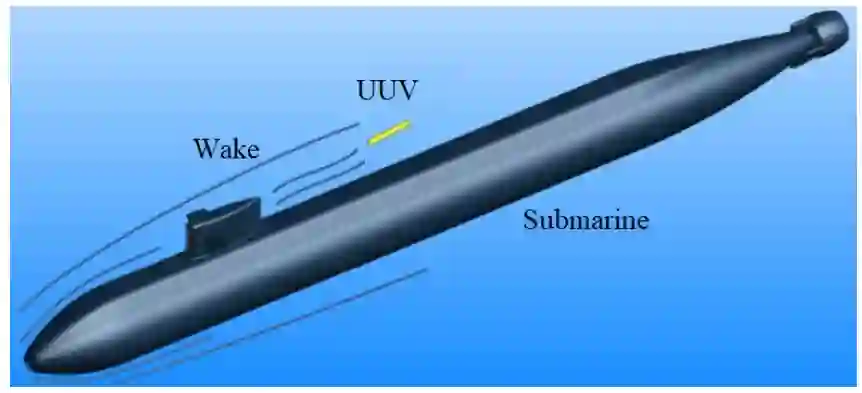
图 1-1: 演示潜艇对水流的影响。由于 UUV 靠近潜艇运行,这种尾流和流场会影响 UUV 的运行。
无人潜航器(UUV)操纵模拟器在模拟靠近移动潜艇的 UUV 运动时受到严重限制,因为它们无法实时确定复杂的湍流流体动力相互作用。潜在流求解器的速度通常足够快,但它们忽略了粘度,从而带来了很大的误差,而粘度在控制中起着至关重要的作用。另一方面,计算流体动力学(CFD)可以精确模拟这些流体动力学相互作用,但模拟一个特定配置的单个 UUV 通常需要数小时或数天才能完成。因此,对于实时应用来说并不实用。为了弥补这一差距,我们开发了一个基于主动采样高斯过程(GP)回归的机器学习框架,以创建一个降阶模型(ROM),利用最少的昂贵模拟次数实时预测水动力相互作用。
引入的主动学习框架(称为 GP 回归的非近视多保真(NMMF)主动学习)通过结合低成本的低保真潜在流动模拟来探索领域,以及优化选择高保真 CFD 模拟作为训练数据来提高模型的准确性,显著而简洁地加快了代理模型的收敛速度。结果表明,GP 回归模型能够准确有效地捕捉 UUV 与移动潜艇之间的流体动力学相互作用。基于所开发的算法,我们能够定义运行包络线,勾勒出 UUV 安全克服流体动力相互作用的区域,以及 UUV 受力过大并与潜艇发生碰撞的区域。这种方法还使能够开发新的自主协议,通过调整所需的 UUV 航向和速度来补偿水动力相互作用,从而使 UUV 安全地保持在所需的航道上。灵敏度分析证实了所提出的控制策略的稳健性。所提出的想法为复杂环境(如湍流边界层)中的控制算法铺平了道路,这些环境以前是无法实时导航的。
成为VIP会员查看完整内容
相关内容

Arxiv
225+阅读 · 2023年4月7日
相关主题



相关VIP内容
相关资讯
相关论文
Arxiv
225+阅读 · 2023年4月7日