
本文的主要重点是开发一种低成本、鲁棒性和高效的合作定位解决方案,以帮助无人自主飞行器在全球定位系统缺失或性能下降的条件下进行导航。
首先,推导出固定翼无人机(UAV)和多旋翼无人机的完全可观测性条件。创建了一个相对位置测量图(RPMG),图中的节点是车辆或已知特征(地标),它们之间的边代表测量结果。利用图论和线性代数概念,得出了可观测矩阵最大秩的条件,并建立了可观测矩阵秩与系统中可用测量值之间的关系。该分析条件的缺点之一是必须在所有时间时刻保持一个连通的 RPMG。因此,我们提出了一种离散时间可观测性条件,即一个时间间隔内的 RPMG 的联合必须是相连的。
接下来,将讨论无人飞行器 (UV) 紧密协调和控制的一个基本问题。在各种应用中,飞行器的惯性位置并不重要。在这种情况下,车辆之间的相对姿态和方位对开发控制器非常有用。众所周知,扩展卡尔曼滤波器(EKF)的性能非常出色,前提是它的初始化接近真实位置并能接收到测量结果。对于没有任何全球定位系统(GPS)测量数据或网络延迟严重(需要重新初始化滤波器)的长距离行驶车辆,已知先验信息的假设是无效的。为了规避这些问题,我们开发了一种多假设卡尔曼滤波器(MHEKF),该滤波器在初始化过程中没有先验信息,这意味着相关的不确定性非常大。
最后,解决了地面车辆的分布式合作定位问题。集中式合作定位需要大量计算。我们开发了一种分布式合作定位算法,使组内的每辆车都能估计自己的惯性状态。该算法是为自主地面车辆开发的,在仿真中仅使用测距数据。
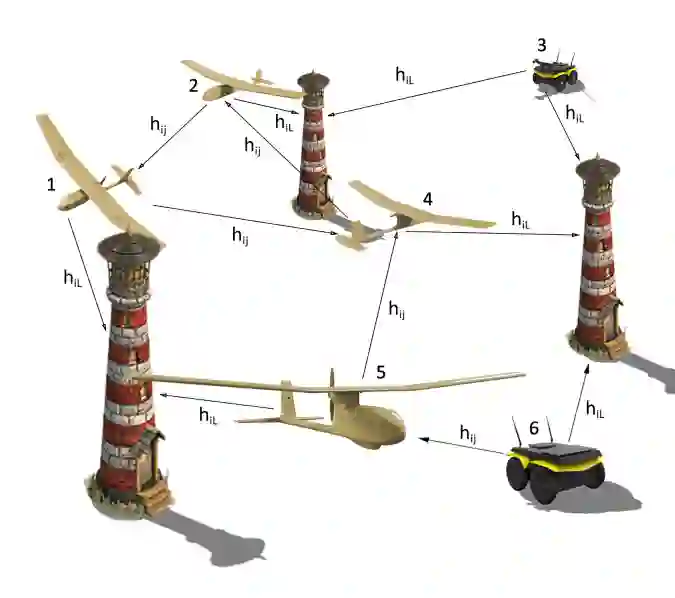
图 1.1:合作定位的相对位置测量图,其中塔作为地标(已知兴趣点),不同的 UV 相互合作。
成为VIP会员查看完整内容
相关内容

Arxiv
42+阅读 · 2023年4月19日
Arxiv
153+阅读 · 2023年3月29日

相关VIP内容
相关资讯
相关论文
Arxiv
42+阅读 · 2023年4月19日
Arxiv
153+阅读 · 2023年3月29日