
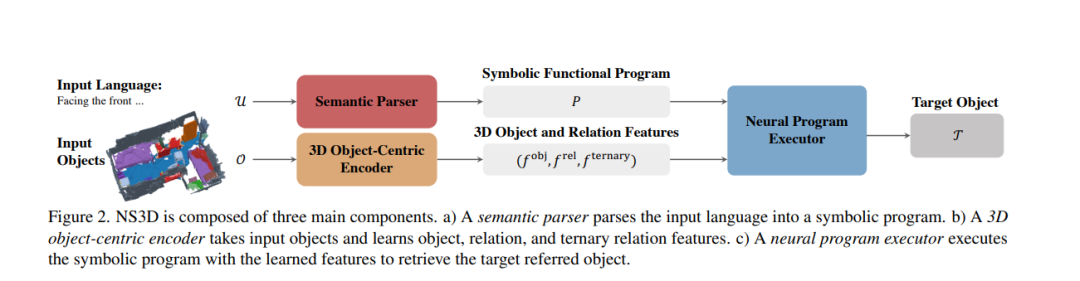
将物体属性和关系在3D场景中进行Grounding是许多人工智能任务的前提条件,例如基于视觉的对话和具身化操作。然而,3D领域的可变性会导致两个基本挑战:1)标记的成本和 2)3D基础语言的复杂性。因此,模型的基本要求是具备数据效率,能够适应不同的数据分布和任务,具备对未见过语义形式的语义进行基础建设(例如,视点锚定和多对象引用)。为了解决这些挑战,我们提出了NS3D,一种用于3D Grounding的神经符号框架。NS3D通过利用大型语言转代码模型,将语言转化为具有层次结构的程序。程序中的不同功能模块是以神经网络的形式实现的。值得注意的是,NS3D通过引入有效推理高度元关系(即,多个对象之间的关系),扩展了先前的神经符号视觉推理方法,这在消除复杂3D场景中的对象歧义中非常关键。模块化和组合式的架构使NS3D能够在ReferIt3D视角依赖任务中取得最先进的结果,这是一个3D指称表达理解基准测试。重要的是,NS3D在数据效率和泛化性设置上显示出显着的改进性能,并展示了对一个未见过的3D问答任务的零样本转移能力。
https://www.zhuanzhi.ai/paper/4277142b07654c7d538a29dceb8c2088
成为VIP会员查看完整内容
相关内容

CVPR 2023大会将于 6 月 18 日至 22 日在温哥华会议中心举行。CVPR是IEEE Conference on Computer Vision and Pattern Recognition的缩写,即IEEE国际计算机视觉与模式识别会议。该会议是由IEEE举办的计算机视觉和模式识别领域的顶级会议,会议的主要内容是计算机视觉与模式识别技术。
CVPR 2023 共收到 9155 份提交,比去年增加了 12%,创下新纪录,今年接收了 2360 篇论文,接收率为 25.78%。作为对比,去年有 8100 多篇有效投稿,大会接收了 2067 篇,接收率为 25%。
Arxiv
0+阅读 · 2023年5月12日
Arxiv
42+阅读 · 2023年4月19日
相关VIP内容
相关资讯
相关论文
Arxiv
0+阅读 · 2023年5月12日
Arxiv
42+阅读 · 2023年4月19日