开发既能安全导航又能在无人干预的情况下执行指定任务的空中机器人--即乘客和货物的完全自主空中移动--是指导空中自主领域研究、设计和开发工作的更大愿景。然而,要同时实现所有类型的空中飞行器完全自主地共享空域是极具挑战性的。航空运输领域的完全自主包括几个方面,如为飞行器提供动力的技术设计、多智能体机队的运行以及符合航空领域严格安全要求的认证过程。因此,"自主先进空中机动性"仍然是一个模糊的术语,其对研究人员和专业人员的影响也不明确。为了填补这一空白,我们从一个全面的角度介绍了自主先进空中机动性这一新兴领域,其中涉及使用无人驾驶飞行器(UAV)和电动垂直起降(eVTOL)飞机进行各种应用,如城市空中交通、包裹递送和监视。文章提出了一个可扩展、可延伸的自主框架,由四个主要模块组成:感知、知觉、规划和控制。此外,文章还讨论了多智能体机队运营和管理方面的挑战和机遇,以及自主航空系统的测试、验证和认证方面的问题。最后,文章探讨了单体模型在航空自主方面的潜力,并分析了其优势和局限性。该视角旨在为先进的自主航空机动性领域及其未来发展方向提供一个整体图景。
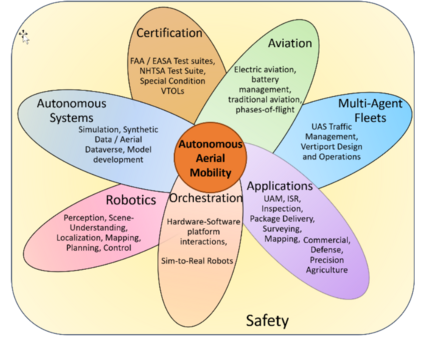
图 1 先进的自主空中机动性--从整体和跨学科的角度详细介绍。
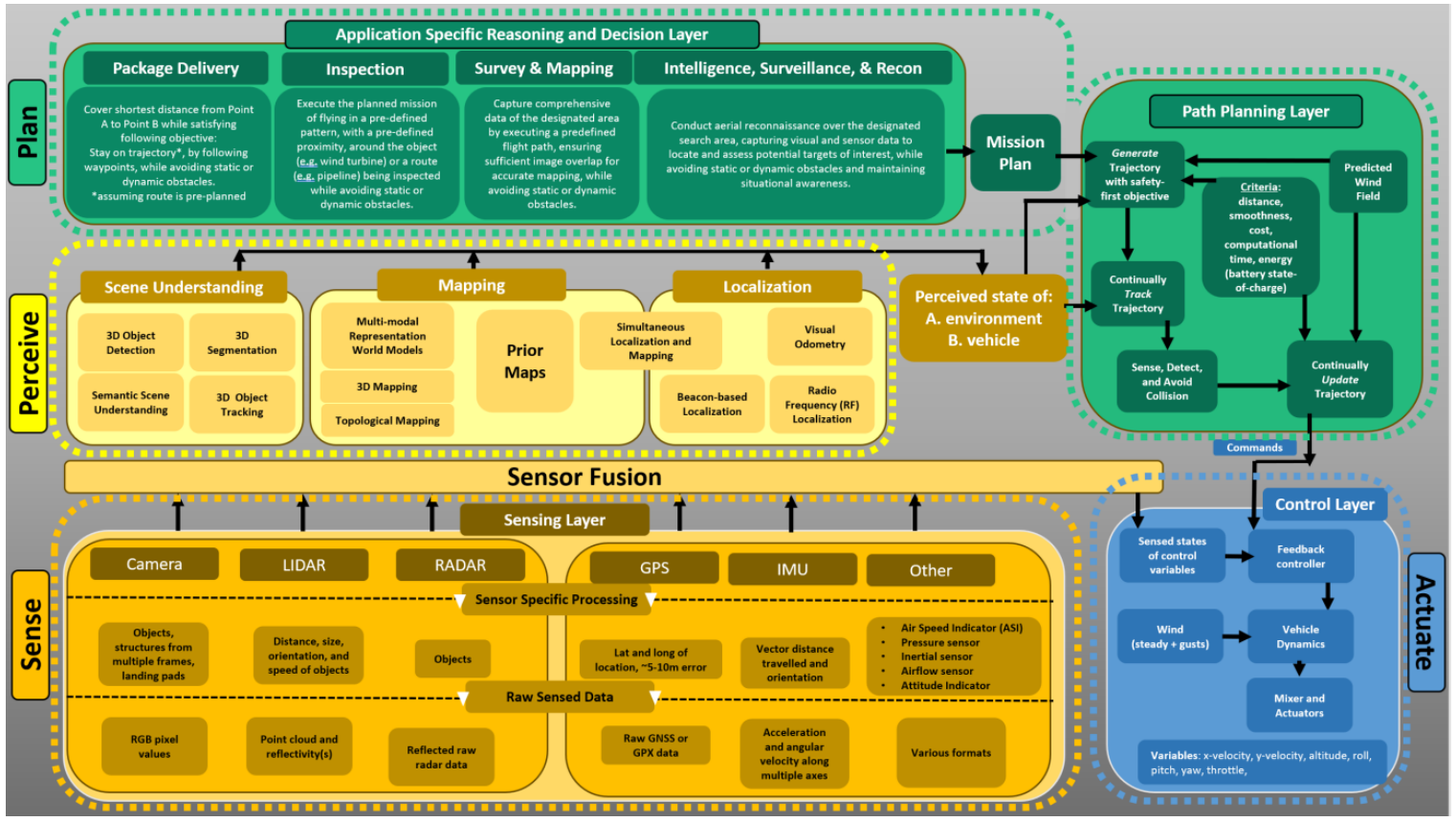
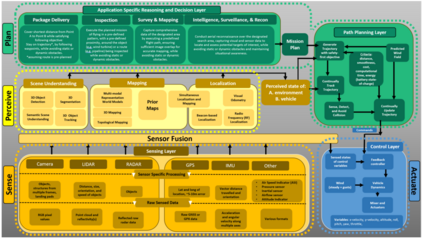
图 3 空中移动的自主模块框架
图 3 显示了拟议的自主模块框架。四个主要模块(传感、感知、规划和驱动)被进一步细分为多个子模块,分别描述了底层传感机制、数据处理模块、数据流模式和机器人算法,这些模块完成了各种子任务,使航空飞行器能够在特定环境中进行导航。
- 传感
传感是指利用各种传感器和传感技术从环境中收集数据或信息的过程。传感包括捕捉周围环境的原始数据,如视觉图像、距离测量、速度、高度和其他相关信息。在空中移动方面,传感器对于了解飞行器周围环境(即环境)和自身状态(飞行器的动态、配置等)至关重要,可帮助飞行器收集实时数据。这些传感器可包括摄像头、LiDAR(光探测与测距)、雷达、GPS(全球定位系统)、IMU(惯性测量单元)等。
- 感知
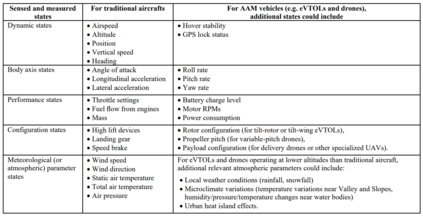
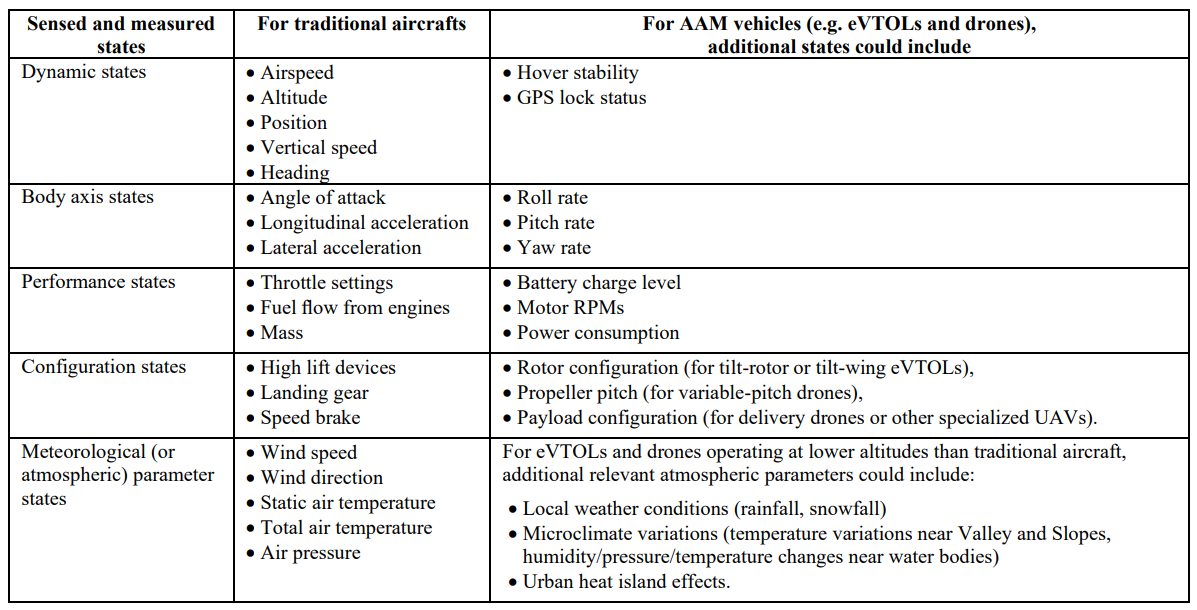
感知是继传感之后的更高层次的过程。它涉及对传感器收集和预处理(在一定程度上)的数据进行解释和理解。感知算法和系统将来自不同传感流的数据结合起来并进行分析,以识别和辨认物体、障碍物、地形、地标以及环境中的其他相关特征。感知还包括估计这些物体的相对位置和速度,确定其对飞行安全和导航的重要性,并预测其未来的移动[45]。吸收有关车辆自身状态的数据也是感知过程的一部分。从本质上讲,感知使自主系统能够了解其周围环境、相对于周围环境的相对位置和状态,并在此基础上做出明智的决策。下表简要列出了各种状态变量和参数,这些变量和参数被感知、测量并最终输入感知模块。
- 规划 "路径规划 "和 "任务规划 "在自主空中移动或一般机器人技术中是两个不同的概念。
a) 路径规划
路径规划是指为飞行器(如无人机或其他无人飞行器)确定最佳路径或轨迹的过程,使其在避开障碍物并遵守某些约束条件的情况下,从当前位置导航到特定目标或目的地。路径规划算法会考虑飞行器的动态、环境信息(障碍物、地形等)以及其他相关因素,以计算出最有效且无碰撞的路径。路径规划的目标是找到一条可行且安全的轨迹,引导车辆从起点到达终点,同时优化时间、能耗或平稳性等标准。
b) 任务规划
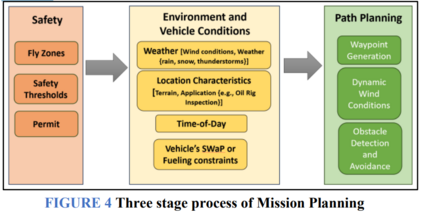
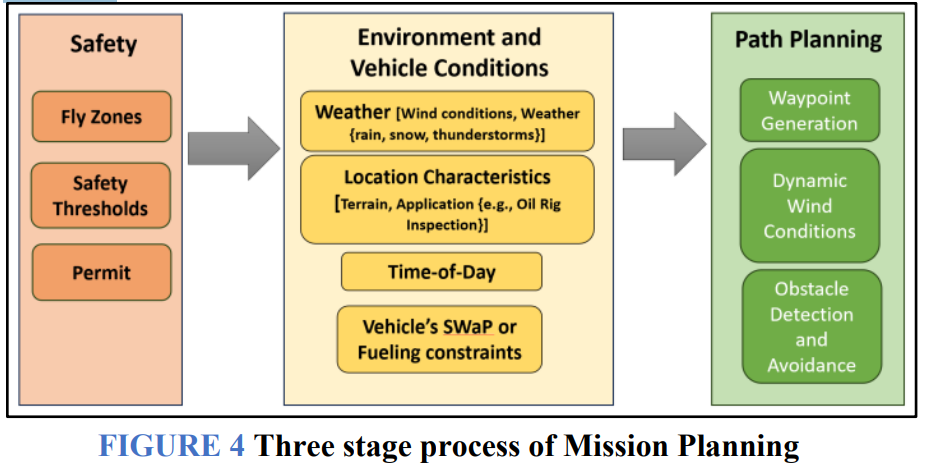
任务规划则是一个更高层次的概念,涉及定义和组织自主系统为实现特定目标而需要完成的一系列任务或目标。它包括确定车辆或机器人为成功完成任务而应遵循的行动顺序、航点和目标。任务规划包含多个方面,包括单个环节的路径规划、任务分配、资源管理以及多个车辆或智能体之间的协调(如适用)。它要考虑任务的总体目标,优化资源和任务分配,以高效实现任务的最终目标。下图 4 显示了任务规划所考虑的各种因素。因此,路径规划可视为任务规划流程中的一个子模块。
- 控制
自主系统框架的第四个也是最后一个功能块是执行。在空中自动控制的情况下,执行就是控制。在感知和理解环境后,飞行器需要进行相应的操作。这是通过控制算法实现的。这些算法根据动态感知的环境、车辆的空气动力学和当时的气象条件来决定车辆应如何移动。
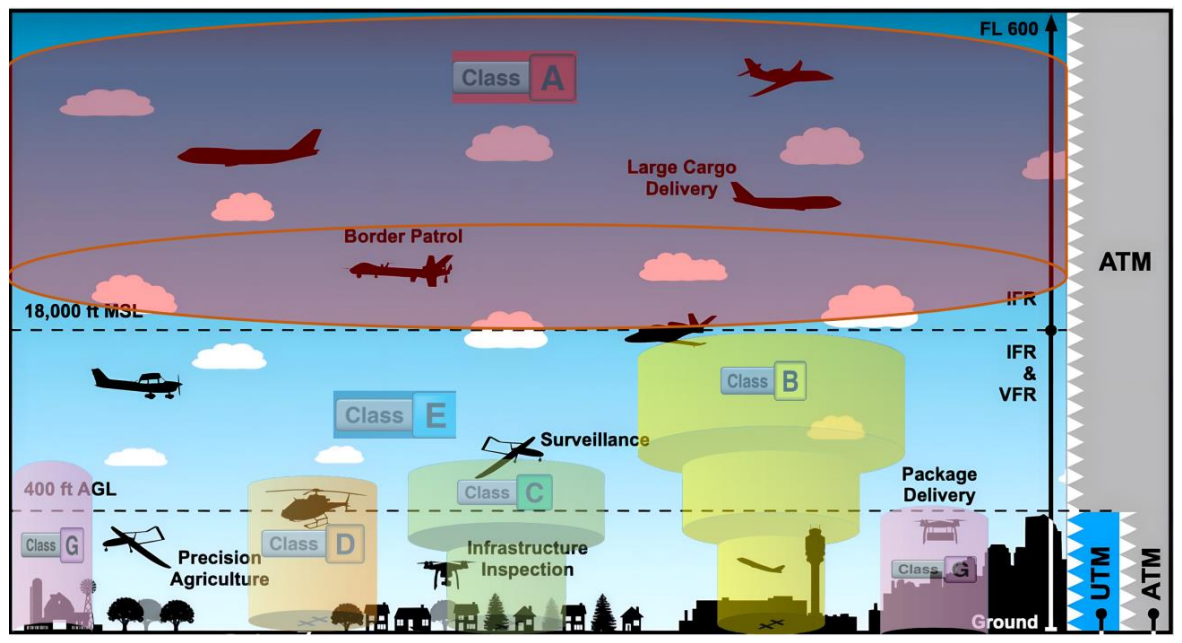
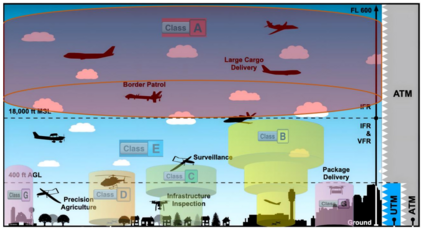
图 9 国家空域系统 (NAS) 运行与城市空中交通 (UTM) 运行的整合。传统飞行器和 AAM 飞行器共享 ATM 和 UTM 管理的空域(见图右侧)。
图 9 提供了 NAS 和 UTM 运行的综合视图,其中 A 类至 G 类飞行器使用各自的 VLOS 和 BVOLS 协议运行。