

现代空对空导弹依赖于通过数据链更新的目标位置和速度数据,直到其自身的寻的器能够锁定目标。数据链目标数据的质量取决于位置和速度更新的误差、更新延迟和更新丢失。本文介绍了一个分析这些数据利用情况的模拟框架。该框架由描述目标、导弹和生成数据链目标更新的模型组成。文中介绍的多功能模拟实验分析了数据链数据质量对不同空对空导弹性能的影响。性能的衡量标准是杀伤概率。模拟结果表明,在尝试过渡到使用导弹的寻的器之前,最终更新的质量对性能的影响最大。除非很大比例的目标更新丢失或寻的器锁定目标延迟,否则导弹通常可以在致命失误距离内击中目标。本文提出的框架适用于评估所有类型制导武器的性能。
1. 导言
飞机的作战生存能力取决于对敌方探测和火力的控制。因此,现代空战几乎全部使用超视距导弹(BVR)。因此,现代空战几乎都使用超视距导弹(BVR)。要提高生存能力,就必须努力提高导弹的运动射程。设计人员试图通过进一步开发导弹火箭发动机和采用空气呼吸导弹发动机来实现这一改进。本文讨论的现代空对空导弹(AAM)使用主动雷达或被动光电红外寻的器。Stillion、Fleeman、Eichblatt、Norman 和 Watson 的著作中包括了这类导弹的实例。受可用空间和电力以及成本因素的限制,寻的器的探测距离仍然大大低于导弹的运动距离。因此,在目标进入寻的器的探测范围之前,需要持续的外部目标数据为导弹提供支持。
由目标位置和速度更新组成的数据通过数据链路发送。目标数据可能来自单个传感器,也可能来自多个空基、地基或空基传感器,它们相互补充测量结果。使用独立的传感器平台可使发射平台在发射导弹后离开交战区。主要传感器是雷达和红外搜索与跟踪系统(IRST)。一旦射手确定了目标轨迹,就可以从自身或导弹传感器的探测范围和万向限制之外发射导弹。在导弹飞行过程中,网络成员可重新瞄准导弹或中止交战。图 1 是空战场景的一个简化示例。
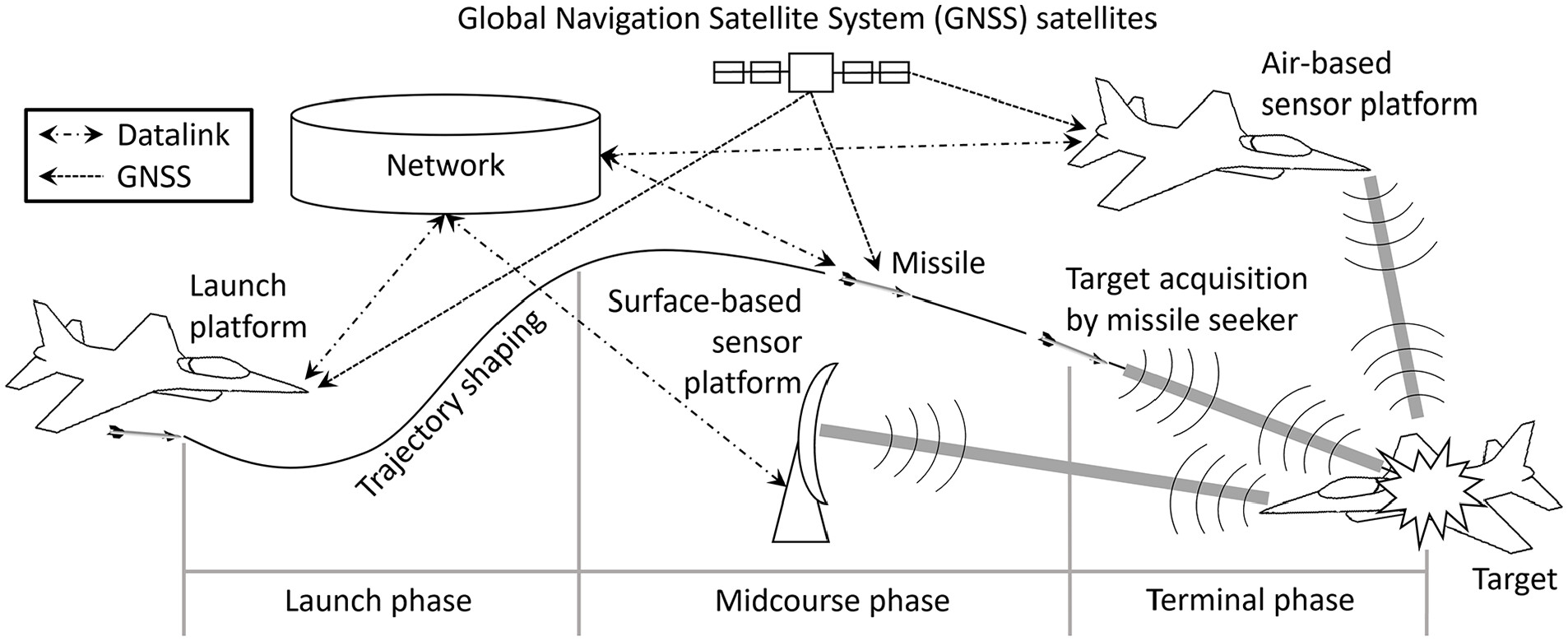
图 1. 使用数据支持导弹的现代 BVR 空战。
在图 1 中,地基和空基传感器平台提供的目标数据在网络中融合,然后通过数据链路发送给包括导弹在内的网络成员。现代网络结构中存在各种类型的平台,网络中可以包含更多数量的传感器。不过,就本文而言,平台数量最多限于四架飞机。导弹的飞行分为三个阶段:发射、中段和末段。在发射阶段,导弹脱离发射平台、加速并利用弹道整形获得势能。在中段阶段,导弹利用数据链更新(DLU)和机载导航系统向目标引导。这些更新本身包含误差和延迟。射程、角度及其速率的测量精度各不相同。由于大射程、数据链天线模式和电磁频谱操作的影响,导弹不可能接收到所有 DLU。一旦目标进入寻的器的探测范围和万向节限制之内,导弹就开始捕获目标。DLU 的估计精度和导弹导航系统与 DLU 的延迟确定了不确定度量,导弹据此搜索目标。导弹利用不确定度量来确保获取预定目标。对位置和速度同时使用不确定度量,可使导弹尝试对位置接近但速度不同的目标进行分类。参与测量目标和网络跟踪目标数据融合的传感器的类型、数量和位置会影响体积的形状和大小。一旦寻的器锁定目标并似乎能提供可靠的数据,导弹就会进入终端阶段并停止使用 DLU。数据链目标数据的质量取决于位置和速度更新的误差、更新延迟和更新丢失。
网络中心战和导弹的发展增加了数据链的使用。因此,必须研究如何利用数据链目标数据来制定空战战术、技术和程序(TTPs)。本文介绍了为这些研究开发的导弹数据链分析(MisDA)模拟框架。特别是,本文将集中分析数据链数据的质量因素对反坦克导弹性能的影响。这里,性能的衡量标准是杀伤概率 PK,即导弹是否能进入目标的致命失误距离内。这个 PK 不能高于探测概率 PD,后者描述了导弹锁定目标的能力。本文的模拟实验结果包括 PD 和 PK,以便更精确地分析数据链目标数据的质量。目标数据融合的确切贡献不在本文讨论范围之内,本文框架仅使用了一个简单的目标数据融合模型。
关于导弹自动驾驶仪和制导法的分析与开发以及飞机对导弹的规避机动,已经发表了大量论文。然而,这些论文并未考虑使用数据链目标数据。此外,还研究了数据链导弹的最佳支持时间以及小组在空战中对 DLU 的最佳使用。这些研究并未涉及数据链数据的质量问题。一项研究使用了一种辅助方法来分析导弹向终端阶段的过渡。另一项研究侧重于开发雷达寻的器模型,使用了数据链数据的随机位置误差和丢失的 DLU 的随机贡献。在上述所有研究中,导弹模型都对空气动力学、寻的器和推进器进行了简化。上文讨论的一些研究只使用了导弹模型的三个平移自由度(3-DOF)。没有考虑提供目标数据的传感器的精度或不确定性量。高保真导弹模型已被用于空战 TTPs 分析、空勤人员培训以及武器系统的性能分析和比较。然而,目前还没有关于使用这类模型分析数据链目标数据的使用情况或其质量影响的出版物。
本文有两方面的贡献。首先,新的仿真框架--MisDA--包含了本研究中开发的传感器平台、数据链和目标捕获模型。像 MisDA 这样的综合仿真框架,能够对现代空战中数据链的使用进行透明、可控的分析,这在非保密文献中还没有出现过。第二个贡献是通过多功能模拟实验证明了 MisDA 的用途,其中分析了数据链目标数据的质量因素对反坦克导弹性能的影响。此外,这些实验还包括研究使用雷达和 EO 传感器的策略如何影响质量因素。这些战术包括传感器的数量和位置以及雷达传感器的模式等。此外,本文还说明了不同类型导弹对质量因素与导弹性能之间相互联系的影响。此类分析尚未在非保密文献中发表过。
本文结构如下。第 2 部分介绍了 MisDA 及其模型。第 3 节介绍了仿真实验,第 4 节讨论了实验结果。第 5 节为结束语。
2. MisDA 仿真框架
MisDA 由描述导弹、目标、发射平台(LP)、传感器平台(SP)、DLU 生成和目标捕获的模型组成。MisDA 的结构如图 2 所示。本文描述的模型以灰色标出,之前介绍的模型以白色标出。

图 2. MisDA 模拟框架及其模型。
发射场景是指交战的几何形状和参与行动者的飞行条件。它由 LP、SP 和目标的轨迹定义。轨迹指的是位置 p(t) 和速度 v(t) 的时间 t 历史记录。3-DOF 轨迹子模型根据用户给 MisDA 的输入,通过组合直线和水平飞行、爬升和下降、协调转弯、上拉和编织机动等片段来生成这些轨迹。模型和子模型将在以下段落中介绍。MisDA 由 Matlab 实现,可在确定性或随机模式下使用。
