
这项工作旨在利用无线音频传感器网络为无人驾驶航空器系统(UAS)提出一种探测、识别和跟踪解决方案。根据适用于无人机系统的技术趋势(更小、更便宜、更合作),我们提出了一种采用与 "攻击者 "相同技术方法的分布式监控解决方案。特别是,由于无人机会引起周围声学环境的变化,我们研究了音频传感器网络的使用。更确切地说,我们采用了一种三阶段算法来检测监控环境中音频能量的存在,识别特定的音频特征,然后与多节点方法合作跟踪无人机。通过实验获取的音频信号,我们展示了所提方法的初步性能。我们还讨论了改进实际实施的未来工作。
参考场景
微型和小型无人机(1 千欧元及以下)成本低,易于采购,使恐怖分子使用这种技术的障碍降至零。此外,开放源码技术通常用于设计无人机系统的某些组件,这就为设计专用有效载荷的人填补了一个很小的知识空白。如此易于采购和个性化的飞行平台最终可以接近合理的目标。根据这一趋势,协调无人机中队很快就会成为任何人都可以利用的资源。应对这种威胁的措施不可能是集中式的。目前,我们看到的非对称解决方案适用于前沿作战基地或安装了大型无人机探测器的沙漠场景。然而,这种威胁在城市场景中可能无处不在,因此建议采用对称的对策,即分布式、小型和廉价的对策。
特别是近年来无线传感器网络的不断发展,以及节点的小型化和低成本化,可以为城市环境或复杂场景提供最合适的解决方案,因为在城市环境或复杂场景中,可能会有平民存在,而固定的军事设施可能并不合适。
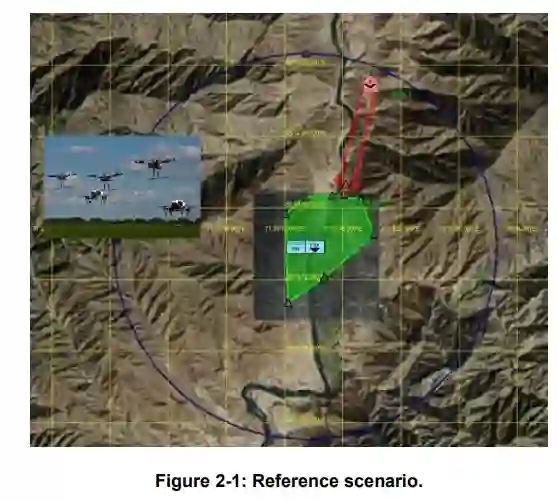
如图 2-1 所示,这项工作将以大量廉价音频传感器为参考场景,每个传感器都能够识别无人机的音频特征,并在发现匹配时,通过与其他节点协作定位恶意来源。研究的重点是在空旷场地场景中,利用音频阵列检测、识别和跟踪单架无人机或小型无人机群,即可与单个大型单元同化。
方法
由于所提方法的目标具有三重性(即检测、识别和跟踪恶意无人机),因此我们的方法采用了三层算法叠加的方式。图 3-1 给出了所追求的研究方法的总体描述。我们依靠获取音频信号来准确描述无人机系统的存在。第一层用于检测无人机系统的存在。在这一阶段,音频传感器从环境中采集少量样本,例如每秒一次,以揭示从环境中感知到的音频能量异常。
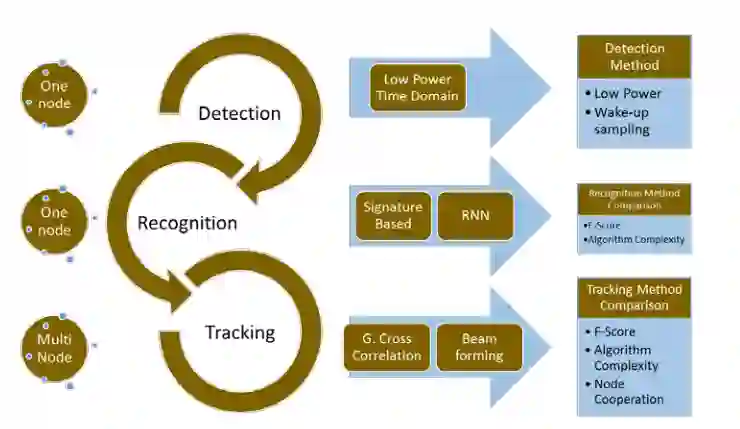
当这一层检测到匹配时,第二层就会在短时间内(如约 240 毫秒[3])通过连续采样进行识别。识别阶段的目标是区分异常声音是否与飞越音频传感器网络的无人机有关,并最终确定其类型。我们将研究两种主要方法:一些作者在 [1] 中提出的方法和循环神经网络 (RNN) [6]。第二识别层中的正匹配将启用第三阶段的跟踪算法。在这一阶段,发出警报的节点(在识别阶段匹配成功的节点)会唤醒邻居节点,以执行波束形成跟踪。这是耗电量最大的阶段,因为需要维护音频传感器网络与其远程控制中心之间的通信链路,以及音频传感器的连续采样阶段。
所采用的分层策略应能优化计算能力和电池需求。事实上,始终处于活动状态的第一层执行的是低复杂度、低消耗的数学计算。另一方面,只有在出现异常音频时,才会执行更强大的计算,即细粒度签名识别和音频跟踪。

