
在新兴的蜂群技术领域,无人机系统条令作为一种规定性的设计要素,一直处于缺乏、潜伏或被忽视的状态。本文讨论了一种与蜂群无人机系统任务条令并行的设计蜂群无人机系统的综合方法。该方法的结构源自基于模型的系统工程、机器人学、人类系统集成、生物学和计算机科学等学科的启发式方法。该方法为设计和操作蜂群无人机系统提供了一种标准方法,力求满足任何预定任务的性能和条令要求。
蜂群体系结构的设计应支持 "少而精"、广泛分散、高度网络化、脉冲式攻击的条令。一般来说,蜂群系统主要采用三种总体指挥与控制(C2)架构:协调控制、集中控制或分级控制,以及分布式控制或分散控制(Dekker,2008 年)。在协调控制中,根据指定的瞬时因素(如位置、状态、任务场景)选择一个智能体作为临时领导者。领导者从其他智能体接收传感器数据,并广播融合后的共同综合画面。如果领导者失效,则会选择一个替代者继续扮演这一角色。这种架构具有一定的鲁棒性,但无法扩展到更大的智能体群或地理位置分散的智能体群,而且会给一个智能体带来很大的处理负担。集中式控制架构类似于传统的军事指挥与控制结构,在这种结构中,智能体按层级组织,详细的战术信息通过指挥链向上反馈。虽然这种分层设计简化了数据流,但并不稳健,在处理需要智能体快速反应的动态场景时缺乏灵活性。对蜂群进行集中控制需要一个枢纽-辐条式通信架构,这种架构有几个缺点:它限制了蜂群的自主行为,无法实现智能体之间的通信,而且在设计中会出现单点故障(Chung 等人,2013 年)。分布式架构的特点是没有领导者;而是通过智能体之间的集体共识做出蜂群决策。这种架构具有稳健性和可扩展性,但要求通信网络能够支持可能增加的数据流量。与蜂群系统设计的其他要素一样,C2 架构的混合体也可用于发挥各自的优势。美国海军的 "合作参与能力"(Cooperative Engagement Capability)防空作战系统采用分布式架构来获取态势感知数据,并采用协调架构来选择目标定位(Dekker,2008 年)。分散控制架构,包括基于市场(或拍卖)的方法,以及隐式衍生的单智能体解决方案,已在蜂群无人机系统中得到成功验证(Chung 等人,2013 年)。由于这些原因,无线网状通信网络被认为是蜂群无人机系统通信架构的一种潜在的关键使能形式(Frew,2008 年)。
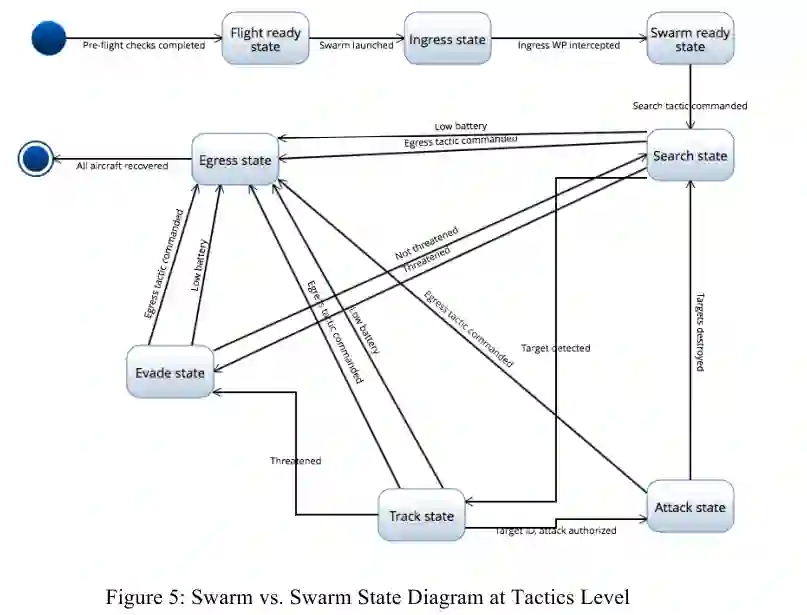
有限状态机(FSM)(或有限状态自动机)已被证明可有效模拟多车自主无人系统架构(Weiskopf 等人,2002 年)。在有限状态自动机架构中,每个智能体在给定时间内都处于几种定义状态之一。智能体感知到的环境条件或遇到的事件会触发触发事件,导致智能体在不同状态间转换。这种类型的结构适用于开发军事蜂群系统,因为状态和触发器可以确定性地定义(就像交通信号灯一样),这对于目标攻击等高风险任务事件是必要的。相反,在搜索等其他任务事件中,可能需要一定程度的不可预测性。在这种情况下,可以使用概率有限状态机 (PFSM)(或概率有限状态自动机),允许在一个状态内有不同的行为,或在状态之间提供多种转换(Paranuk,2003 年)。
