
军事行动需要具备对复杂的大城市环境进行态势了解的能力。这通常是在情报、监视和侦察(ISR)任务中制定的。这些任务类型发生在战斗的不同阶段,包括战斗行动和稳定与支持行动(SASO)。自主移动机器人小组可在已知的动态城市环境中执行巡逻和侦察任务,为士兵提供支持。
本文旨在开发一个名为 "风险地图 "的概率框架。自主机器人将使用 "风险地图 "规划其行动,"风险地图 "显示了一个与战术相关的位置,在该位置的暴露或环境可能使攻击造成最大伤害(例如,可能的简易爆炸装置或狙击手位置)。
“风险地图”以决策过程为基础,针对适应性对手事件分配机器人巡逻。这些技术将利用时间演化来防止对手不可避免地适应这些策略,因为这可能会使这些策略的效果大打折扣。
使用多机器人协调方法进行分散、信息量大且自适应的采样应用不会出现单点故障。它允许随时预测,任何机器人在任何时间点都能获得环境的合理模型。此外,它还能将所需的通信量保持在最低水平。此外,适当的地理信息系统(GIS)技术为军事指挥官提供了快速整合数据集、评估条件、规划战略和评估选项的手段。

图:UGV和无人机之间的交互作用,进行源搜索和目视目标识别。
未来,人类将与人工智能系统密切合作。智能系统将成为团队成员,并将起到扩展单个单元的覆盖范围和能力的作用,从而实现前所未有的能力。
自主机器人的智能探索和强大的协作监控将成为城市行动的关键,使其能够预防未来的脆弱性和威胁风险。本论文探讨了环境的先验知识和类似场景中的行动历史如何预测和预防未来的攻击。在这篇论文中,我们提出了一个概率框架,在这个框架中,可以将一套领域专家规则与空间和语义知识结合起来,使自主智能体能够收集信息。然后,自主智能体可以利用这个不断演化的框架,针对不断变化的信息环境规划最佳行动,从而以最佳方式完成任务。我们的方法扩展了[Pit+08; ZST15]中描述的技术,用于本论文中介绍的 MAST/ARL 导航模块所使用的基于信息的探索框架。Pita 等人创建了系统架构: ARMOR。该系统提供的月历满足了洛杉矶国际机场官员对检查站和警犬在洛杉矶国际机场部署的所有关键要求。
多机器人团队为部队提供支持的一大挑战是了解环境是如何动态变化的,以便为车队选择最明显或最便捷路线的区域提供安全保障。为了应对这一挑战,利用有关特定地点的地理信息系统数据和活动日志很有意义。实现这一目标的一种方法是使用基于信息的地图(风险地图),该地图由一组模块化组件组成,在评估风险的先验概率时,这些组件代表了敌方战略知识。此外,风险地图还有一个时间组件,可逐渐回到先前的地图状态,代表战争迷雾。
我们考虑的现实场景是,由不同能力的机器人组成的团队探索未知环境,每个机器人获取并计算自己的地图,并与团队其他成员交换这些信息,同时考虑到通信限制,即机器人只能在特定距离内通信,信息量的交换受带宽限制。此外,每个机器人都能从探索任务切换到寻找任务源,并能在需要时提供或请求援助。
论点陈述
利用自适应信息采样的多机器人探索和导航协调策略,使机器人平台能够在未知环境中自主执行情报、监视和侦察(ISR)任务,从而防止未来的脆弱性和威胁风险。
贡献
- 完整的分布式多机器人 SLAM 解决方案,可执行基于特征、基于目标以及基于姿态的图形 SLAM,并具有概率数据关联和闭环功能。
- 一种分布式算法,可根据相对姿态测量结果估算多个合作机器人或移动设备的 3D 轨迹。
- 提供高低威胁级别信息的系统框架,该信息将用作运动编队和巡逻的行动计划。
- 异构多机器人自适应信息采样的新型协调策略,具有分散性和鲁棒性。
本论文的所有贡献都通过使用模拟和真实数据的实验结果得到了验证。
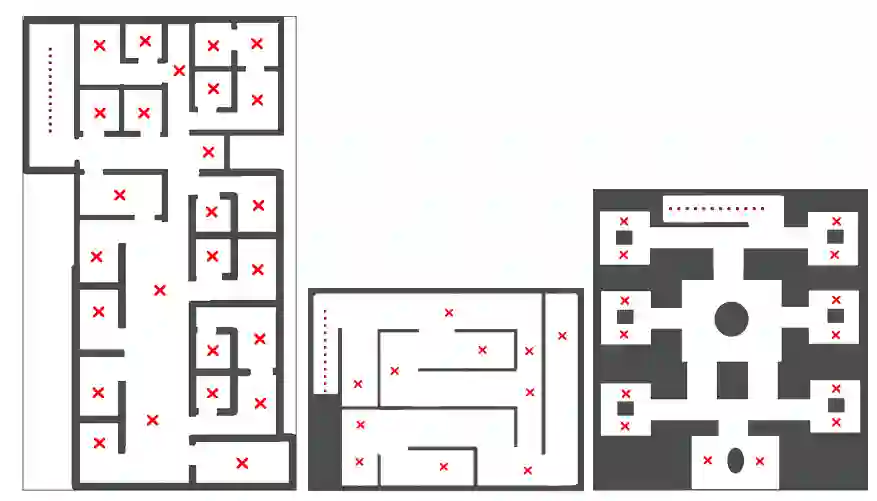
图:模拟地图,用于在舞台模拟器内的各类环境中测试协调策略。机器人在其初始起始区域显示为一排红点,该区域代表一个突破口。导航关键点用红色 "X "标记表示。

