
地面军事机器人(UGV)已经发展了二十多年,该领域的当代技术进步正在促进其应用慢慢接近成熟阶段。我们可以预期,未来军事行动的自动化程度将是巨大的,军事后勤也不例外。军事人员被机器人系统取代的趋势在常规和危险任务中很明显,重点是机器人系统的任务性能,它可以从非常低的传感器和处理延迟中受益。这方面是人的能力所不能比拟的,它为未来军事战场的设想创造了关键的基础。
1.0 引言
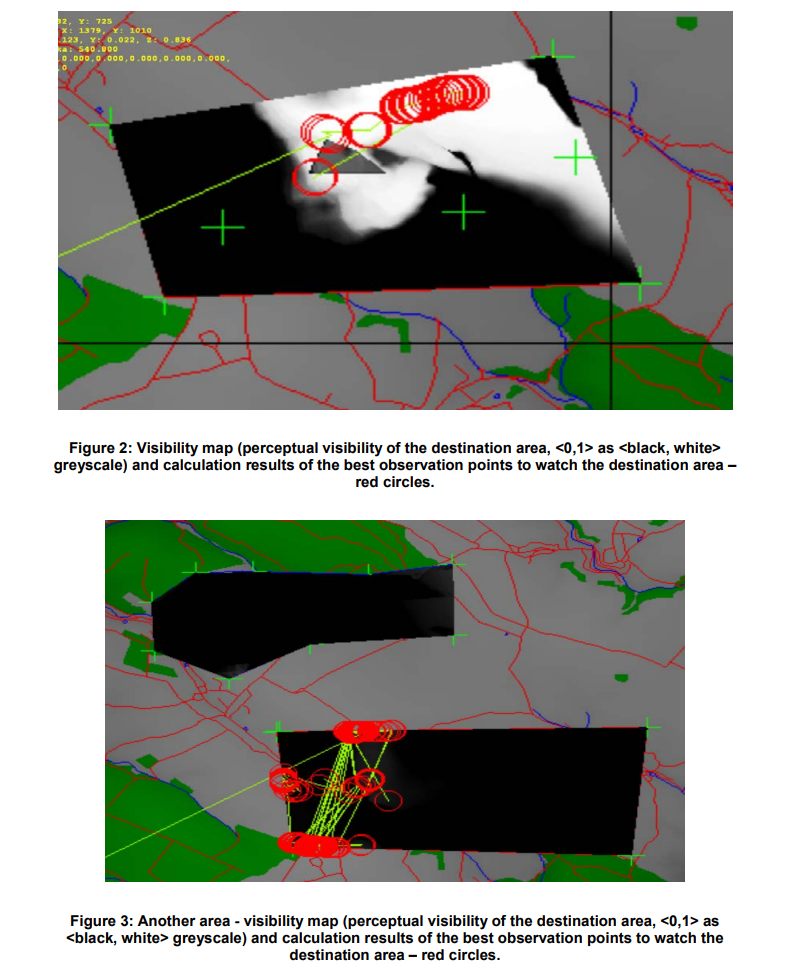
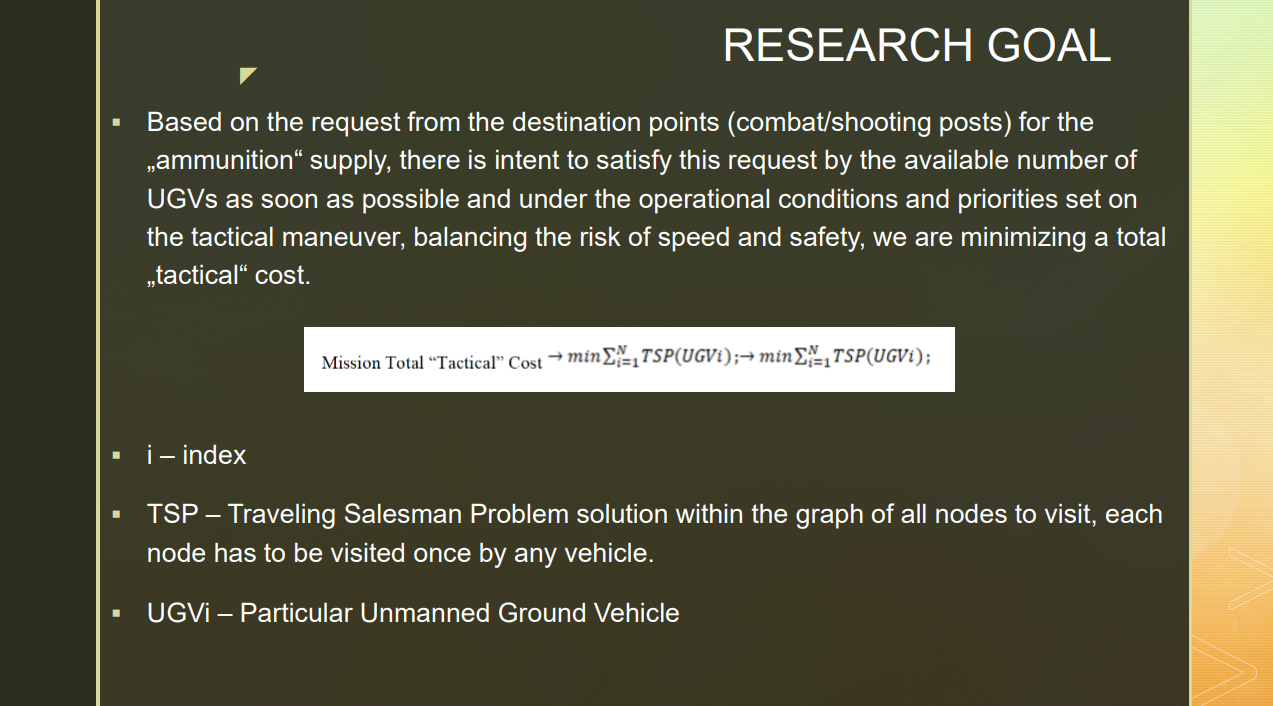
未来军事机器人的关键组成部分之一是作战决策能力,在实际或估计的共同作战图景中,实时地、用可用的资产来适应每一个行动方案。本文的重点是作战物流适应性规划,在复杂的作战环境中,应用UGV群来建立一个供应输送链。该任务在数学上被建模为运筹学(多标准)和情报分析问题,其中应用了离散建模和模拟技术。
在自主系统应用的军事领域,我们对这个问题的理解还处于起步阶段。很明显,这个领域的复杂性非常高,而且分散在几个层面。如果要对行动画面的更新做出快速反应,就有一个强烈的假设,即高水平的数据分析过程(基于与C4ISTAR系统相连的数据集)必须是自动化的。
成为VIP会员查看完整内容
相关内容
专知会员服务
48+阅读 · 2022年9月12日
Arxiv
0+阅读 · 2022年10月20日
Arxiv
0+阅读 · 2022年10月19日

相关VIP内容
专知会员服务
48+阅读 · 2022年9月12日
相关资讯