摘要
兵棋模拟是一种决策工具,可以为利益相关者分析的场景提供定量数据。它们被广泛用于制定军事方面的战术和理论。最近,无人驾驶飞行器(UAVs)已经成为这些模拟中的一个相关元素,因为它们在当代冲突、监视任务以及搜索和救援任务中发挥了突出的作用。例如,容许战术编队中的飞机损失,有利于一个中队在特定战斗场景中胜利。考虑到无人机的分布可能是这种情况下的决定性因素,无人机在超视距(BVR)作战中的位置优化在文献中引起了关注。这项工作旨在考虑敌人的不确定性,如射击距离和位置,使用六种元启发法和高保真模拟器来优化无人机的战术编队。为红军蜂群选择了一种空军经常采用的战术编队,称为line abreast,作为案例研究。优化的目的是获得一个蓝军蜂群战术编队,以赢得对红军蜂群的BVR战斗。采用了一个确认优化的稳健性程序,将红军蜂群的每个无人机的位置从其初始配置上改变到8公里,并使用兵棋方法。进行了战术分析以确认优化中发现的编队是否适用。
索引词:优化方法,计算机模拟,无人驾驶飞行器(UAV),自主智能体,决策支持系统,计算智能。
I. 引言
兵棋是在战术、作战或战略层面上模拟战争的分析性游戏,用于分析作战概念,训练和准备指挥官和下属,探索情景,并评估规划如何影响结果。这些模拟对于制定战术、战略和理论解决方案非常有用,为参与者提供了对决策过程和压力管理的洞察力[1]。
最近,无人驾驶飞行器(UAVs)作为一种新的高科技力量出现了。利用它们来实现空中优势可能会导致深刻的军事变革[2]。因此,它们的有效性经常在兵棋中被测试和评估。
由于具有一些性能上的优势,如增加敏捷性、增加过载耐久性和增加隐身能力,无人机已经逐渐发展起来,并在许多空中任务中取代了有人系统[3]。然而,由于战斗的动态性质,在视觉范围之外的空战中用无人系统取代有人平台是具有挑战性的。在空战中,无人机可以被远程控制,但由于无人机飞行员对形势的认识有限,它将在与有人平台的对抗中处于劣势。然而,这种限制可以通过自动战斗机动[4]和战术编队的优化来克服。此外,使用无人机可以允许一些战术编队和战略,而这些战术编队和战略在有人驾驶的飞机上是不会被考虑的,例如允许中队的飞机被击落,如果它有助于团队赢得战斗。文献中最早的一篇旨在优化超视距(BVR)作战中的飞机战术编队的文章[5]表明,空战战术是用遗传算法(GA)进行优化的候选方案。该实施方案采用分层概念,从小型常规作战单位建立大型编队战术,并从两架飞机的编队开始,然后是四架飞机,最后是这些飞机的倍数。在模拟中没有对导弹发射进行建模。当一架飞机将其对手置于武器交战区(WEZ)的高杀伤概率(Pkill)区域内一段特定时间,简化的交战模拟器就宣布伤亡。事实证明,所提出的方法的应用是有效的,它消除了团队中所有没有优化编队的飞机,并为整个优化编队的飞机团队提供了生存空间。
Keshi等人[6]使用了与[5]相同的分层概念,从由两架飞机组成的元素中构建大型战术编队。模拟退火遗传算法(SAGA)被用来优化编队,使其能够克服对局部最优解的收敛。对16架飞机的编队进行了优化,提出的最优解表明SAGA比基本的GA更有效。最后,为了探索一个稳健的SAGA,对不同的马尔科夫链进行了比较,事实证明自调整马尔科夫电流更适合所提出的问题。
Junior等人[7]提出使用计算机模拟作为一种解决方案,以确定BVR空战的最佳战术,使击落敌机的概率最大化。在低分辨率下使用通用参数对飞机和导弹进行建模,并改编了名为COMPASS的模拟优化算法,模拟了两架飞机对一架飞机的BVR战斗。低分辨率模型假定在水平面的二维空间内有一个均匀的直线运动。使用优化的战术表明,击落敌机的平均成功率从16.69%提高到76.85%。 Yang等人[8]提出了一种方法来优化飞机对一组目标的最佳攻击位置和最佳路径。该工作考虑到飞机能够同时为每个目标发射导弹,并将飞机与目标有关的攻击性和脆弱性因素作为评价攻击位置的指标。一个高保真模拟被用来模拟每个导弹的飞机、雷达、导弹和WEZ的动态特性。这项工作并没有解决在BVR战斗场景中优化一组飞机对另一组飞机的编队问题。
Li等人[9]提出了一种基于指挥员主观认识的编队优化方法,即在空战中目标设备信息不确定的情况下选择飞机编队的问题。首先,计算战斗机的战斗力,这是通过指挥员的主观认识评估目标战斗力的基础。战斗机的战斗力以能力的形式表现出来,包括攻击、探测、生存能力、通信、电子战、预警系统等。因此,通过采用前景理论和综合模糊评估来优化空战训练。最后,一个应用实例证明了该方法在小规模空战中的可行性。作者声称,利用战斗力评估战斗情况的能力为优化空战训练提供了一种新的方法。
Özpala等人[10]提出了一种在两个对立小组中使用多个无人驾驶战斗飞行器(UCAVs)进行空战的决策方法。首先,确定两队中每个智能体的优势地位。优势状态包括角度、距离和速度优势的加权和。在一个团队中的每个智能体与对方团队中的每个智能体进行比较后,每个航空飞行器被分配到一个目标,以获得其团队的优势而不是自己的优势。为一对对立的团队实施了一个零和博弈。对许多智能体参与时的混合纳什均衡策略提出了一种还原方法。该解决方案基于博弈论方法;因此,该方法在一个数字案例上进行了测试,并证明了其有效性。
Huang等人[11]开发了新的方法来处理UCAV编队对抗多目标的合作目标分配和路径规划(CTAPPP)问题。UCAV的编队是基于合作决策和控制的。在完成目标侦察后,训练指挥中心根据战场环境和作战任务向每架UCAV快速传输任务分配指令。UCAV机动到由其火控系统计算出的最佳位置,发射武器装备。合作目标分配(CTAP)问题通过增强型粒子群优化(IPSO)、蚁群算法(ACA)和遗传算法(GA)来解决,并在归因、精度和搜索速度等方面进行了比较分析。在进化算法的基础上发展了UCAV多目标编队的合作路径规划(CPPP)问题,其中提供并重新定义了独特的染色体编码方法、交叉算子和突变算子,并考虑燃料成本、威胁成本、风险成本和剩余时间成本来规划合作路径。
Ma等人[12]开展的工作解决了在BVR作战场景中优化两组(R和B)无人机对手之间的优势地位问题。一个无人机ri∈R对一个无人机bj∈B的优势是通过ri和bj之间的距离、ri的导弹发射距离的下限和上限、ri的高度和bj的高度之差以及ri的最佳发射高度来估计的。决定性的变量是无人机在两组中的空间分布和每架飞机在这些组中的目标分配。无人机在三维作战空间BVR中的可能位置被简化(离散化),通过立方体的中心位置来表示。每个无人机组都有一组立方体。优化问题被建模为一个零和博弈,并被解决以获得纳什均衡。
Ma等人[12]提出的工作没有使用高保真模拟来分析无人机空间分布的选择和分配给它们的目标对BVR作战的影响。高保真模拟对飞机、雷达、导弹及其导弹的WEZ的动态特性进行建模。这些动态特性也影响到BVR作战时每架飞机的行动触发,因此也影响到最终的结果。例如,如果在两组无人机之间第一次冲突后的时间窗口内考虑高保真BVR作战模拟,新的冲突可能会发生,直到模拟结束。因此,每个在交战中幸存的无人机将能够选择一个新的目标,这取决于可用目标的优势值。在[12]中没有考虑与无人机行为有关的不确定性。有关敌方无人机在战术编队中的确切位置及其导弹发射距离的信息是行为不确定性的例子。这两个信息和上面描述的其他信息在BVR战斗中是相关的:它们直接影响飞机之间的交战结果。
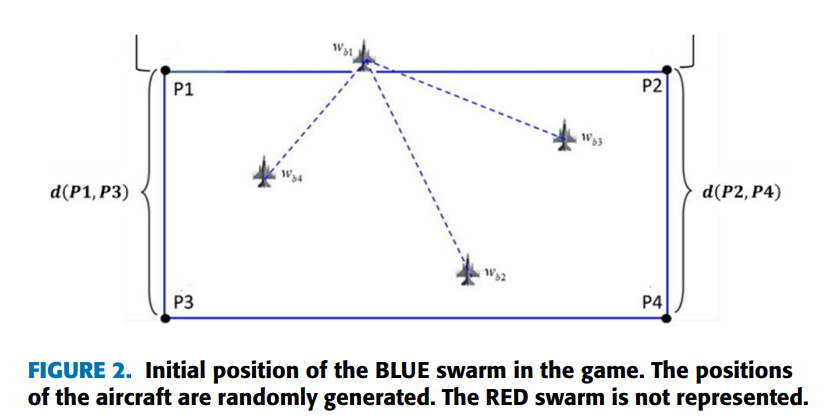
在这项研究中,我们试图解决文献中发现的一些局限性,如低分辨率模拟、与敌人有关的不确定性的处理以及缺乏对优化解决方案的稳健性的确认,旨在提高兵棋结果的质量。我们的目标是验证哪些蓝色蜂群的战术编队可以在BVR战斗中战胜红色蜂群。作为一个案例研究,RED蜂群使用了空军经常采用的战术编队,称为line abreast[13]。为了评估BLUE蜂群解决方案的稳健性,我们解决了新的问题,改变了RED蜂群每架飞机的位置,目的是估计新的RED蜂群编队对BLUE蜂群的优化战术编队的效率的影响。
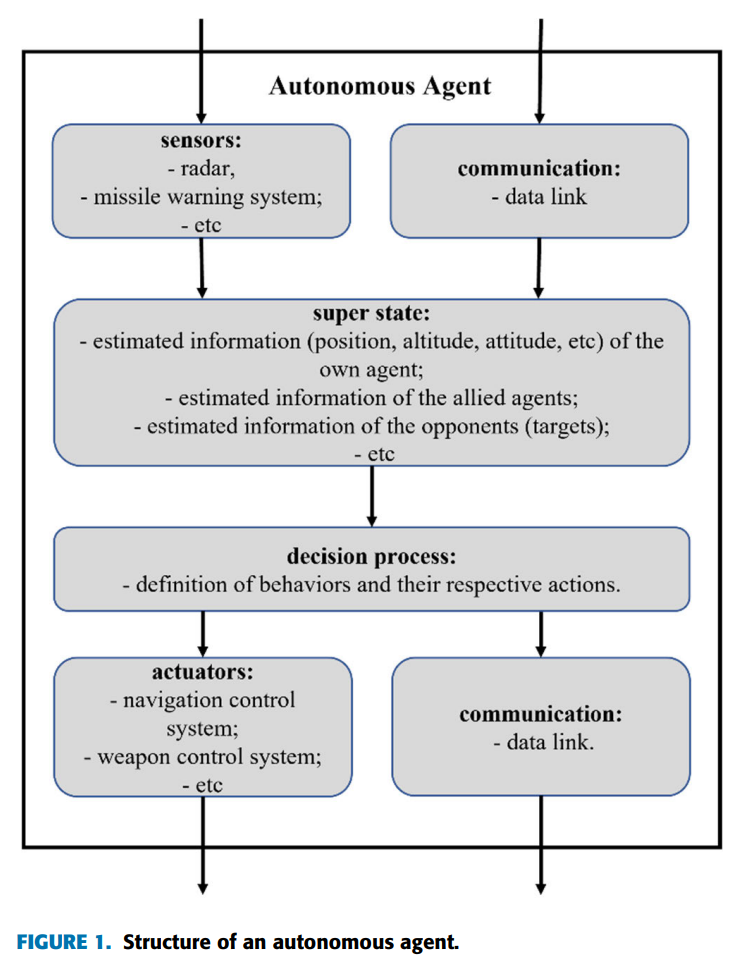
我们使用自主智能体和高保真计算机模拟来优化BVR战斗中的无人机战术编队,考虑与敌人相关的不确定性,如战术编队中的位置误差和导弹发射距离。统一行为框架(UBF)被采纳为创建自主智能体的基础。飞机和导弹在三维环境中用六个自由度(DoFs)建模。
该程序将在接下来的章节中进一步讨论。