
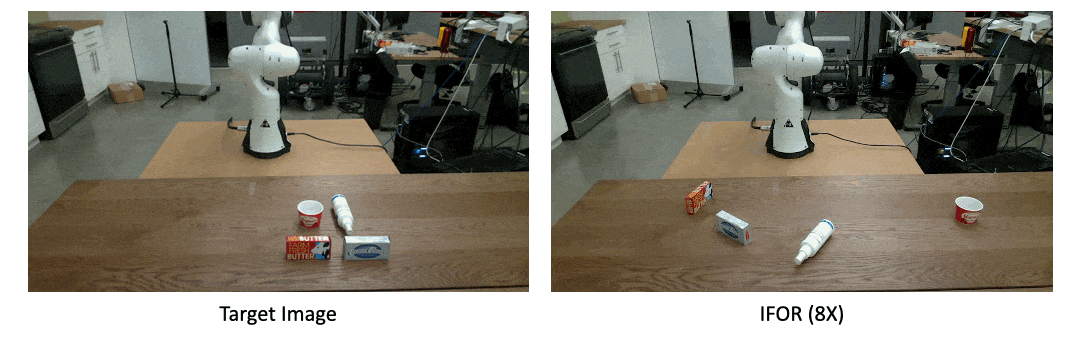
IFOR: Iterative Flow Minimization for Robotic Object Rearrangement 论文链接:https://arxiv.org/abs/2202.00732 项目主页:https://imankgoyal.github.io/ifor.html
论文简介:对于非结构化环境中的各种现实世界机器人应用来说,从视觉中准确地重新排列对象是一个关键问题。本文提出了一种端到端的方法 IFOR,用于在给定原始和最终场景的 RGBD 图像的情况下解决未知对象的对象重新排列的挑战性问题。首先学习了一个光流模型,以纯粹从合成数据中估计对象的相对变换。然后在迭代最小化算法中使用此流程,以实现对以前看不见的对象的准确定位。本文方法适用于杂乱的场景和现实世界,同时仅在合成数据上进行训练。
成为VIP会员查看完整内容
相关内容

专知会员服务
34+阅读 · 2020年6月19日
专知会员服务
44+阅读 · 2020年3月26日
Arxiv
1+阅读 · 2022年4月20日
Arxiv
0+阅读 · 2022年4月18日
Arxiv
0+阅读 · 2022年4月16日
Arxiv
1+阅读 · 2022年4月15日

相关VIP内容
专知会员服务
34+阅读 · 2020年6月19日
专知会员服务
44+阅读 · 2020年3月26日
相关资讯
相关论文
Arxiv
1+阅读 · 2022年4月20日
Arxiv
0+阅读 · 2022年4月18日
Arxiv
0+阅读 · 2022年4月16日
Arxiv
1+阅读 · 2022年4月15日