

随着无人驾驶飞行器(UAVs),也被称为无人机,变得容易获得和负担得起,这些设备的应用已经大大增加。其中一种应用是使用无人机飞越大面积区域并探测所需实体。例如,一群无人机可以探测海洋表面附近的海洋生物,并向用户提供发现的动物的位置和类型。然而,即使无人机技术的成本降低,由于使用内置先进功能的定制硬件,这种应用的成本也很高。因此,本论文的重点是编制一个容易定制的、低成本的无人机设计,并配备必要的硬件,以实现自主行为、蜂群协调和机载物体探测能力。此外,本论文概述了必要的网络结构,以处理无人机群的互连和带宽要求。
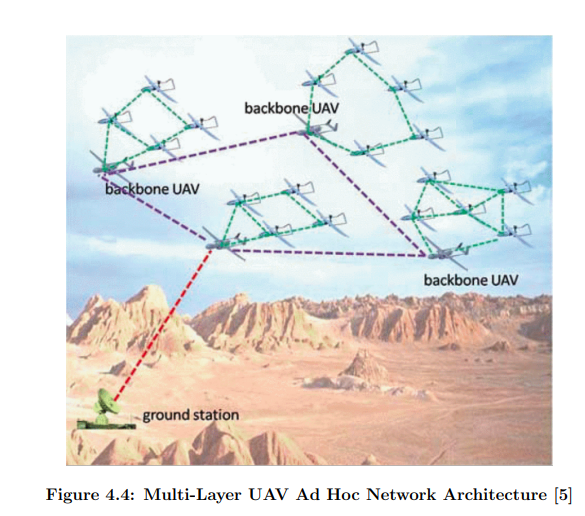
无人机机载系统使用PixHawk 4飞行控制器来处理飞行机械,使用Raspberry Pi 4作为通用计算能力的配套计算机,并使用NVIDIA Jetson Nano开发套件来实时进行物体检测。实施的网络遵循802.11s标准,采用HWMP路由协议进行多跳通信。这种拓扑结构允许无人机通过网络转发数据包,大大扩展了蜂群的飞行范围。我们的实验表明,所选的硬件和实现的网络可以在高达1000英尺的范围内提供直接的点对点通信,通过信息转发可以扩大范围。该网络还为带宽密集型数据(如实时视频流)提供了足够的带宽。预计飞行时间约为17分钟,拟议的设计为中程空中监视应用提供了低成本的无人机群解决方案。
成为VIP会员查看完整内容
相关内容

Arxiv
0+阅读 · 2023年6月2日

相关VIP内容
相关资讯
相关论文
Arxiv
0+阅读 · 2023年6月2日