
今天,机器人车辆(RV)在现代工业和军事领域都发挥着重要作用。越来越多的RV成为自主操作,其嵌入式控制系统很容易受到网络攻击。这些攻击可以通过适当的工具检测和预防,但如果执行得当,也几乎无法检测到。
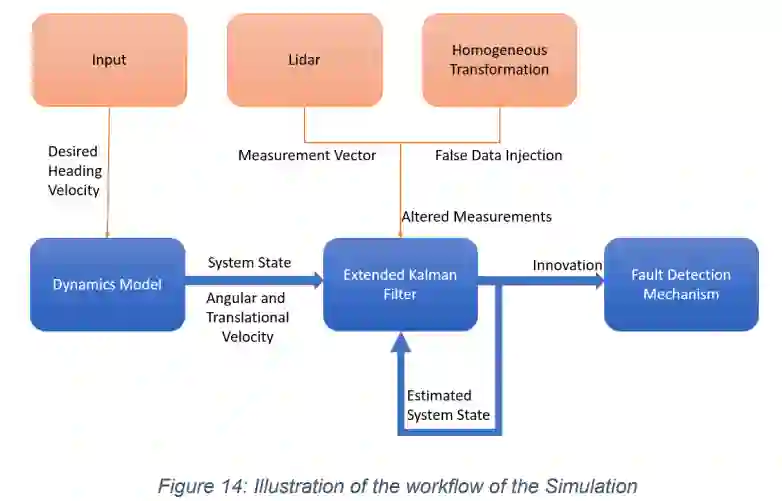
在这项工作中,一种网络攻击,即虚假数据注入,被用来欺骗扩展卡尔曼滤波器(EKF),并使用传统的故障检测机制来试图识别攻击。在MATLAB中模拟了一个基于TurtleBot 3 'Burger'的双轮差动转向机器人车。导航系统通过向测量设备--LiDAR传感器注入虚假数据而受到攻击。虚假数据的注入改变了射程和方位的测量,旨在改变机器人的测量航向角并改变其轨迹。然后对攻击进行调整,使其无法被实施的反制措施检测到。
在这篇论文中,证明了虚假数据注入可以以这样一种方式执行,即故障检测机制几乎不可能察觉到攻击。仿真结果表明,隐蔽性的关键是以缓慢和稳定的方式注入虚假数据,通过引导EKF的输出来欺骗它。引入的偏差只要是在与噪声相同的数量级上,大多是不被注意的,而噪声是机器人导航系统的一部分。相反,测量数据的突然和严重变化很容易被EKF和故障检测机制发现。
成为VIP会员查看完整内容
相关内容



相关VIP内容
相关资讯
相关论文