
美国空军无处不在的一套任务是在高附带环境下从空中平台攻击民用环境中的军事目标。概述战术条令的《联合出版物 3-60》将其定义为 “发现、固定、跟踪、瞄准、攻击、评估” (F2T2EA)“杀伤链”。前三个阶段(F2T)代表情报、监视和侦察(ISR),必须在与目标交战前完成。MQ-9 “死神 ”是一种遥控飞机(RPA),它已成为任务集中的一项重要资产。
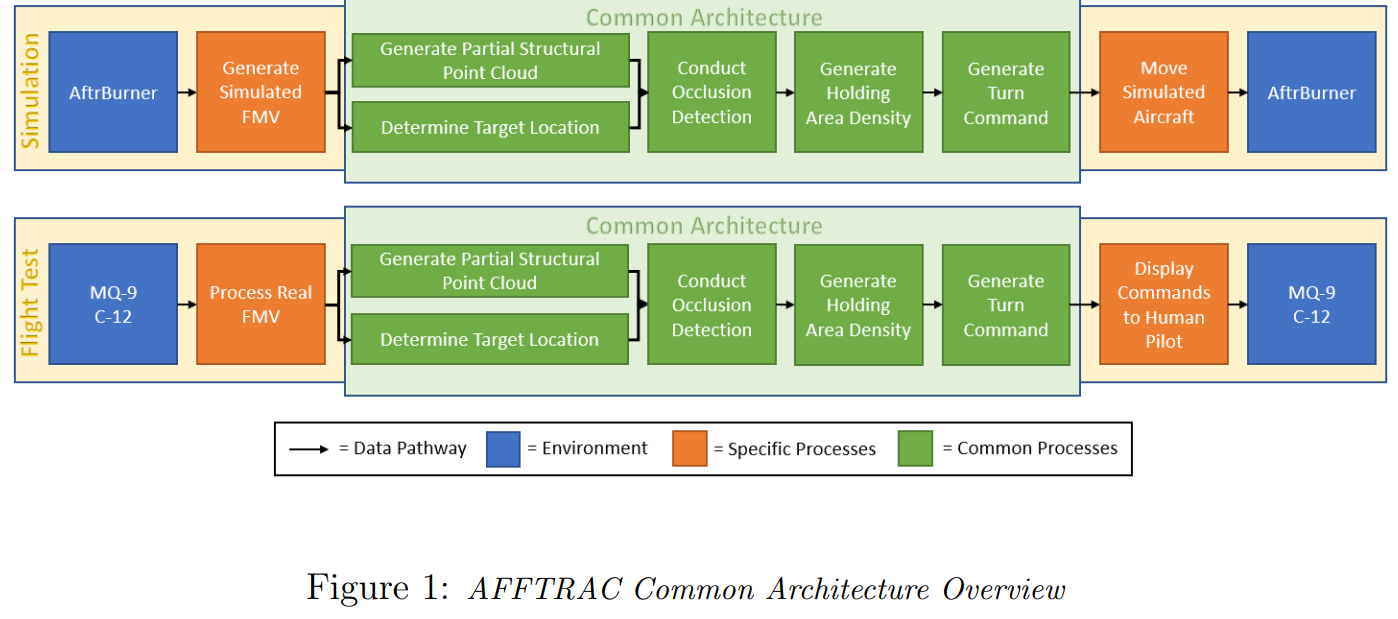
RPA ISR 行动的一个限制因素是,如果指挥链路被切断,就会失去目标轨迹。RPA 要在没有指挥链路的情况下有效执行 ISR 任务,就需要具备自主 F2T 目标的能力。自动查找、固定和跟踪 (AFFTRAC) 就是为帮助解决这一问题而开发的。虽然算法组件并不新颖,但创建并集成到概念验证战术自动驾驶仪中却很新颖。单目立体视觉用于处理轨道期间获取的连续图像,以生成原始结构的部分结构点云。然后,利用该部分结构点云生成飞机停留区域的密度。一种简单的贪婪算法利用这一滞留区域密度生成飞机转弯指令,以近似于战术 ISR 滞留。其结果是,现有 MQ-9 传感器的图像被用来提供指令引导,以自主保持对目标的视线。
通过加权分类准确性对保持区域密度的生成进行评分。模拟中 55% 的准确率足以保证保持正确。飞行测试中 38% 的得分不足可能是由于部分结构点云的旋转误差造成的。生成的转弯指令正确率为 94%。然而,次优指令并没有引导飞机拦截停机区域密度的中间部分,从而产生了振荡飞行路径。在模拟飞行中,AFFTRAC 有 87% 的时间停留在保持区域内,但在飞行测试中,由于较高的空速和较低的指令延迟,只有 45% 的时间停留在保持区域内,这使得振荡飞行路径更加恶化。在模拟飞行中,AFFTRAC 有 96% 的时间与目标保持视线一致,而在飞行测试中则为 100%。这优于 360 度恒定保持的 82% 和 MQ-9 飞行员的 96%。总体而言,AFFTRAC 是一个很有前途的战术自动驾驶仪初始框架,但还需要进一步开发,使组件算法更加成熟。
本论文的结构遵循典型的顺序。但是,必须牢记有两种模式:模拟和飞行测试。在论文的正常进程中,这两个部分将并行处理。第 2 章包括文献和理论综述。本章需要学术读者特别注意,因为其中提出的许多操作概念对理解至关重要。一些设计选择源自这些操作范式。第 3 章详细介绍了模拟和现实世界实例的方法。该章按这两个领域的组成部分进行了细分。第 4 章讨论结果并评估其性能。第 5 章包含模拟和测试之间的定性比较、总体结论以及对后续工作的具体建议。
