低成本的无人驾驶飞行器(UAV)编队已被接受为合作搜索和勘测地形的替代方案。这些无人飞行器由可靠性较低的单元组装而成,因此可能出现单元故障。由于无人飞行器也是通信节点,因此因故障而失去无人飞行器会降低编队的覆盖效率并影响通信。飞行 Ad Hoc 网络(FANET)就属于这种情况,一个通信节点的故障可能会使覆盖多个节点的网络部分被隔离。
本研究的主要目标是开发一种弹性模型,使我们能够分析单个无人机故障对编队性能的影响,从而提高编队的弹性。
所提出的解决方案使用基于智能体的建模与仿真技术对无人机编队进行建模与仿真。无人机被建模为自主智能体,搜索到的地形被建模为二维 MxN 网格。通过智能体之间的通信,可以实时掌握所有单元格过境和占用的准确数据。通过这种通信,无人驾驶飞行器智能体可以估算出在网格内移动的最佳选择,并知道所有智能体访问单元格的确切次数。
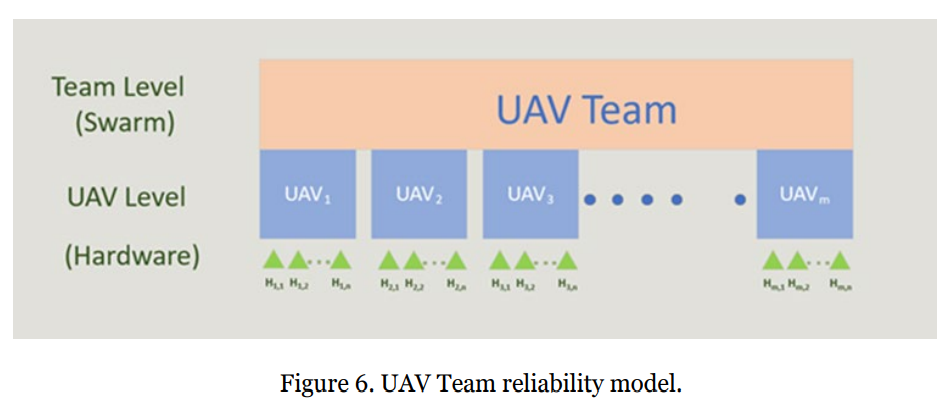
每架无人机都被模拟为业余爱好者使用的固定翼飞机,配备一套通用执行器和一个通用控制器。单个无人飞行器的故障按照可靠性故障树进行模拟。每个受影响的无人飞行器都会被禁用,并从有效单元库中剔除。每次单元故障后,系统都会生成新的拓扑结构。它会为网格中的每个节点(无人飞行器)生成一组最小距离树。因此,在节点故障后,或在网格发生变化时,新树将根据需要描绘出重新排列的链接。 节点移动导致拓扑结构发生变化。该模型应生成各种参数,如受损节点的数量和位置、故障前后的性能,以及建立编队恢复能力模型所需的估计恢复时间。本研究涉及三个研究目标:为无人机场景建模确定适当的工具;开发一个用于评估无人机编队恢复能力的模型,以克服以往研究的局限性;以及通过多次模拟对模型进行测试。
由于以往的研究侧重于系统通信中断(即节点故障),而没有考虑无人机单元的可靠性,因此本研究填补了这一文献空白。随着使用容易发生故障的低成本小型单元的普及,这种考虑变得至关重要。