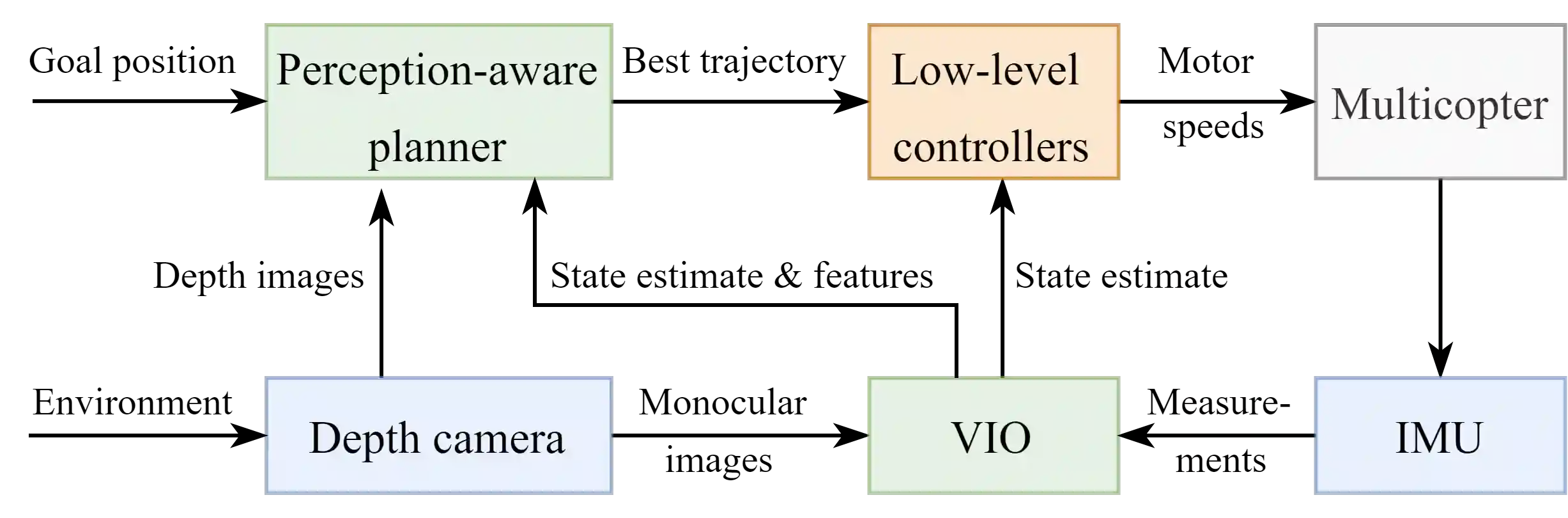
Visual inertial odometry (VIO) is widely used for the state estimation of multicopters, but it may function poorly in environments with few visual features or in overly aggressive flights. In this work, we propose a perception-aware collision avoidance trajectory planner for multicopters, that may be used with any feature-based VIO algorithm. Our approach is able to fly the vehicle to a goal position at fast speed, avoiding obstacles in an unknown stationary environment while achieving good VIO state estimation accuracy. The proposed planner samples a group of minimum jerk trajectories and finds collision-free trajectories among them, which are then evaluated based on their speed to the goal and perception quality. Both the motion blur of features and their locations are considered for the perception quality. Our novel consideration of the motion blur of features enables automatic adaptation of the trajectory's aggressiveness under environments with different light levels. The best trajectory from the evaluation is tracked by the vehicle and is updated in a receding horizon manner when new images are received from the camera. Only generic assumptions about the VIO are made, so that the planner may be used with various existing systems. The proposed method can run in real-time on a small embedded computer on board. We validated the effectiveness of our proposed approach through experiments in both indoor and outdoor environments. Compared to a perception-agnostic planner, the proposed planner kept more features in the camera's view and made the flight less aggressive, making the VIO more accurate. It also reduced VIO failures, which occurred for the perception-agnostic planner but not for the proposed planner. The ability of the proposed planner to fly through dense obstacles was also validated. The experiment video can be found at https://youtu.be/qO3LZIrpwtQ.
翻译:视觉惯性奥氏测量仪(VIO)被广泛用于对多镜仪进行国家估计,但是在缺乏视觉特征的环境中或过度攻击性飞行中,它可能运作不良。在这项工作中,我们建议为多镜仪提出一个感知到的避免碰撞轨迹计划仪,可以用任何基于地貌的VIO算法来使用。我们的方法能够将飞行器飞向一个目标位置,在未知的静止环境中避免障碍,同时实现良好的VIO状态估计准确性。拟议的计划员对一组最小的JER轨迹进行取样,发现其中没有碰撞轨迹,然后根据它们达到目标和感知质量的速度对其进行评估。我们建议对多镜仪的动作模糊性及其位置都进行感知质量评估。我们的新动作模糊性使轨迹在不同的光度环境中自动调整。评估的最佳轨迹由飞行器跟踪,并在从摄像头收到新的图像时以淡化的方式更新。只有通用的 VOO 假设,因此,计划可以对它的细度进行小的图像进行评估,这样, 使得计划能够对各种直径进行精确度进行评估, 并且用各种电路路路路变能力来计算。我们的拟议方法也可以在服务器上运行中进行真正的校验计划。 。我们的拟议方法可以通过真实性计划进行真正的校验。我们使用真正的飞行计划, 。我们在现实中可以进行真正的飞行计划进行真正的校正。