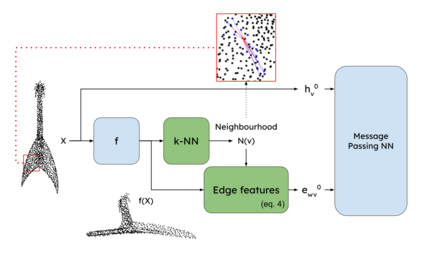
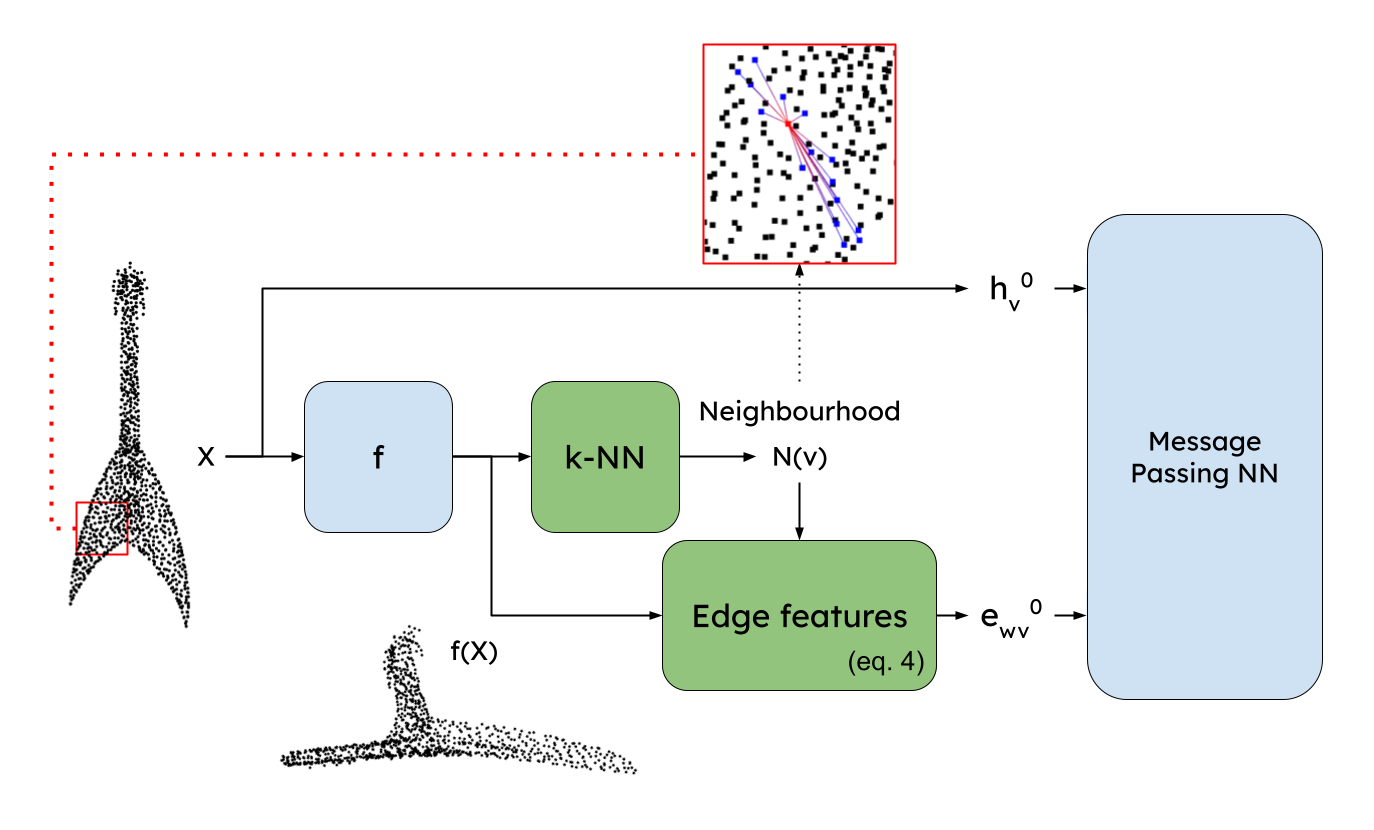
Processing 3D pointclouds with Deep Learning methods is not an easy task. A common choice is to do so with Graph Neural Networks, but this framework involves the creation of edges between points, which are explicitly not related between them. Historically, naive and handcrafted methods like k Nearest Neighbors (k-NN) or query ball point over xyz features have been proposed, focusing more attention on improving the network than improving the graph. In this work, we propose a more principled way of creating a graph from a 3D pointcloud. Our method is based on performing k-NN over a transformation of the input 3D pointcloud. This transformation is done by an Multi-Later Perceptron (MLP) with learnable parameters that is optimized through backpropagation jointly with the rest of the network. We also introduce a regularization method based on stress minimization, which allows to control how distant is the learnt graph from our baseline: k-NN over xyz space. This framework is tested on ModelNet40, where graphs generated by our network outperformed the baseline by 0.3 points in overall accuracy.
翻译:使用深层学习方法处理 3D 点球并不是一件容易的任务。 一个常见的选择是用图形神经网络来做,但这个框架涉及在点间建立边缘, 而这些点之间显然没有关联。 从历史上看, 提出了一些天真的和手工制作的方法, 比如 近距离邻居( k- NN) 或 Xyz 特性的查询球点, 更注重于改进网络而不是改进图表。 在这项工作中, 我们提出了一个更有原则的方法, 从 3D 点库中创建一个图表。 我们的方法是以 k- NN 来对输入 3D 点球的转换执行 k- NN 。 这种转换是由多拉特 Perceptron (MLP) 完成的, 其可学习参数与网络的其余部分一起优化。 我们还采用了一种基于减压的正规化方法, 可以控制所学图离我们基线: k- NN 超过 xyz 空间的距离。 这个框架是在模型Net40 上测试, 。 在那里, 我们网络生成的图表使基线比整个精确度超过 0.3 3 点 。