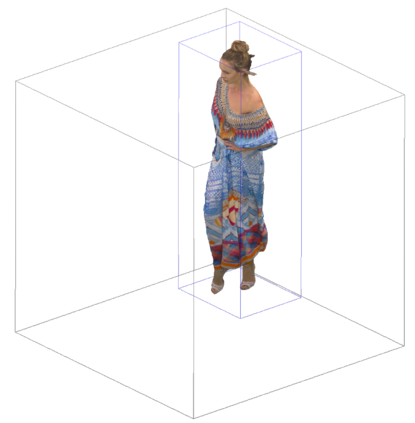
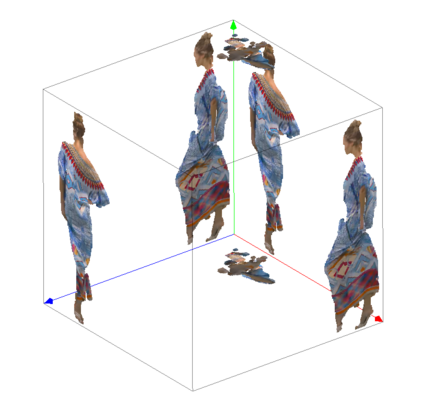
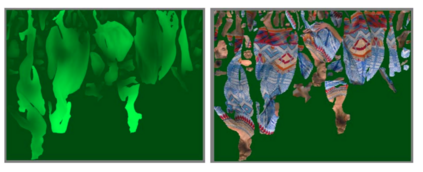
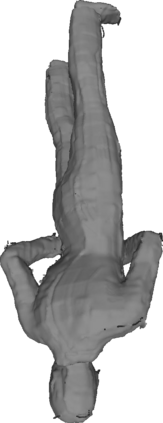
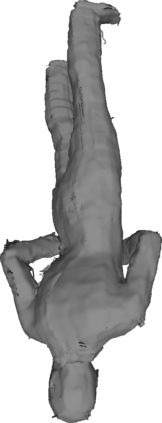
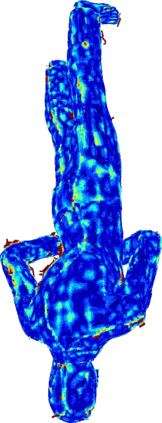
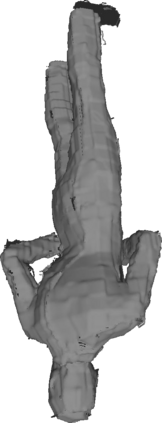
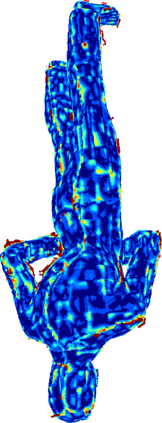
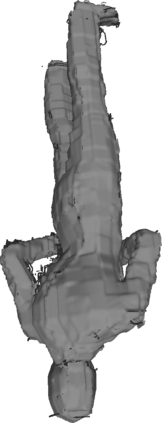
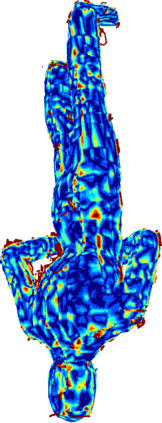
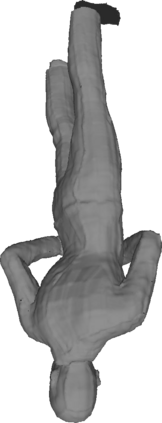
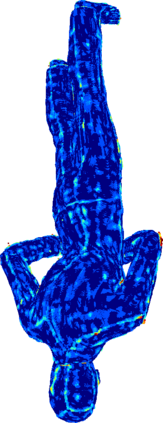
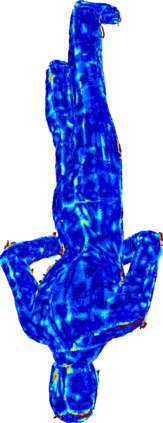
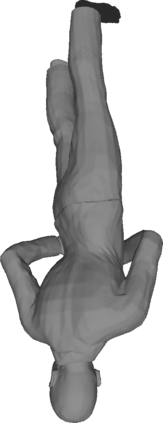
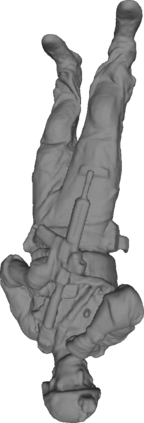
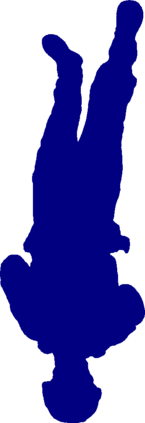
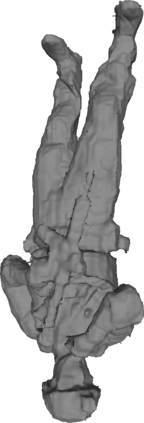
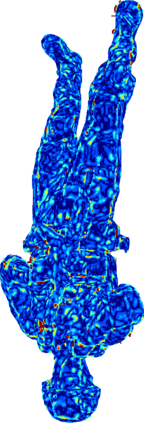
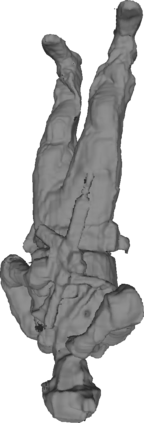
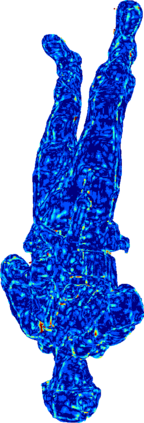
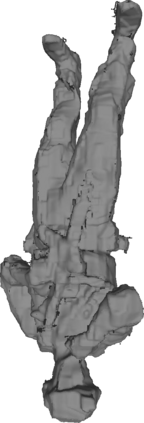
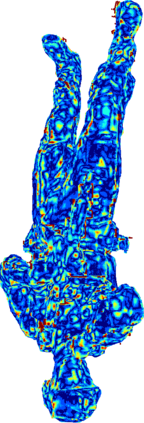
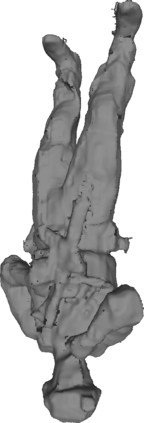
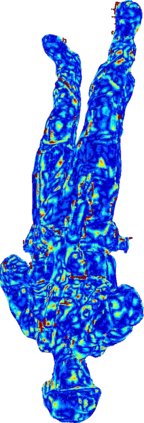
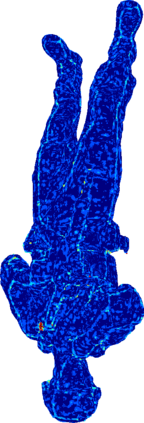
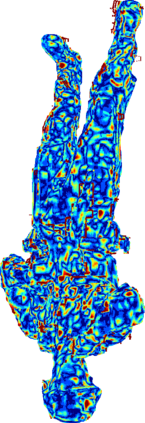
Photo-realistic point cloud capture and transmission are the fundamental enablers for immersive visual communication. The coding process of dynamic point clouds, especially video-based point cloud compression (V-PCC) developed by the MPEG standardization group, is now delivering state-of-the-art performance in compression efficiency. V-PCC is based on the projection of the point cloud patches to 2D planes and encoding the sequence as 2D texture and geometry patch sequences. However, the resulting quantization errors from coding can introduce compression artifacts, which can be very unpleasant for the quality of experience (QoE). In this work, we developed a novel out-of-the-loop point cloud geometry artifact removal solution that can significantly improve reconstruction quality without additional bandwidth cost. Our novel framework consists of a point cloud sampling scheme, an artifact removal network, and an aggregation scheme. The point cloud sampling scheme employs a cube-based neighborhood patch extraction to divide the point cloud into patches. The geometry artifact removal network then processes these patches to obtain artifact-removed patches. The artifact-removed patches are then merged together using an aggregation scheme to obtain the final artifact-removed point cloud. We employ 3D deep convolutional feature learning for geometry artifact removal that jointly recovers both the quantization direction and the quantization noise level by exploiting projection and quantization prior. The simulation results demonstrate that the proposed method is highly effective and can considerably improve the quality of the reconstructed point cloud.
翻译:光现实点云的捕捉和传输是隐蔽视觉通信的基本推进因素。 动态点云的编码过程, 特别是由 MPEG 标准化组开发的基于视频的点云压缩( V- PCC), 正在以压缩效率提供最先进的性能。 V- PCC 以点云对 2D 平面的投影为基础, 并将序列编码为 2D 纹理和几何补补补补顺序。 然而, 由此导致的定量错误可以引入压缩工艺品, 这可能会对经验的质量非常不愉快( QoE )。 在这项工作中, 我们开发了一个新的基于视频点点的点云云压缩压缩( V- PCC) 。 我们的新框架包括点云采样方案、 文物移除网络和组合方案。 点云取样方案使用基于立方基的补丁来将点云切成为补丁。 地球测量工艺品清除网络随后处理这些补丁, 精度和平面平面平面平面平面的平面分析方案随后用一个高额的平流法进行合并。 我们的平面平面平面平面平面平面的平面分析方案将利用一个平面的平面的平面方案, 将最终的平流法化方案进行合并。