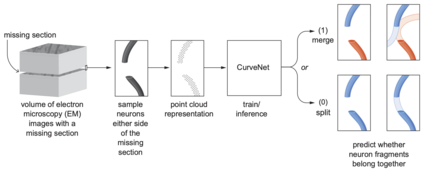
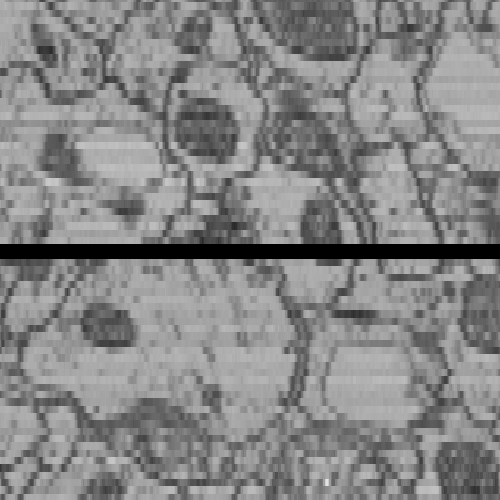
In the field of Connectomics, a primary problem is that of 3D neuron segmentation. Although Deep Learning based methods have achieved remarkable accuracy, errors still exist, especially in regions with image defects. One common type of defect is that of consecutive missing image sections. Here data is lost along some axis, and the resulting neuron segmentations are split across the gap. To address this problem, we propose a novel method based on point cloud representations of neurons. We formulate this as a classification problem and train CurveNet, a state-of-the-art point cloud classification model, to identify which neurons should be merged. We show that our method not only performs strongly but scales reasonably to gaps well beyond what other methods have attempted to address. Additionally, our point cloud representations are highly efficient in terms of data, maintaining high performance with an amount of data that would be unfeasible for other methods. We believe that this is an indicator of the viability of using point clouds representations for other proofreading tasks.
翻译:在连接工程学领域,一个主要问题是3D神经分解领域。虽然基于深学习的方法已经取得了显著的准确性,但错误仍然存在,特别是在图像缺陷的地区。一个常见的缺陷类型是连续缺失图像部分。这里的数据在一些轴线上丢失,由此产生的神经分解跨越了差距。为了解决这个问题,我们提出了一个基于神经元点云表示法的新颖方法。我们把这个方法作为一个分类问题来拟订,并训练CurveNet,这是一个最先进的点云分类模型,以确定哪些神经元应该合并。我们显示,我们的方法不仅非常有力,而且相当合理,差距远远超过其他方法试图解决的范围。此外,我们的点云表示法在数据方面效率很高,保持高性能,而大量数据对于其他方法来说是行不通的。我们认为,这是将点云表示法用于其他校对任务的可行性指标。