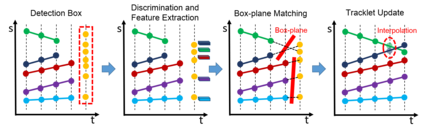
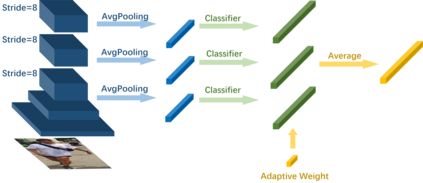
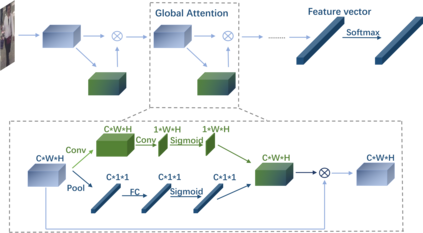
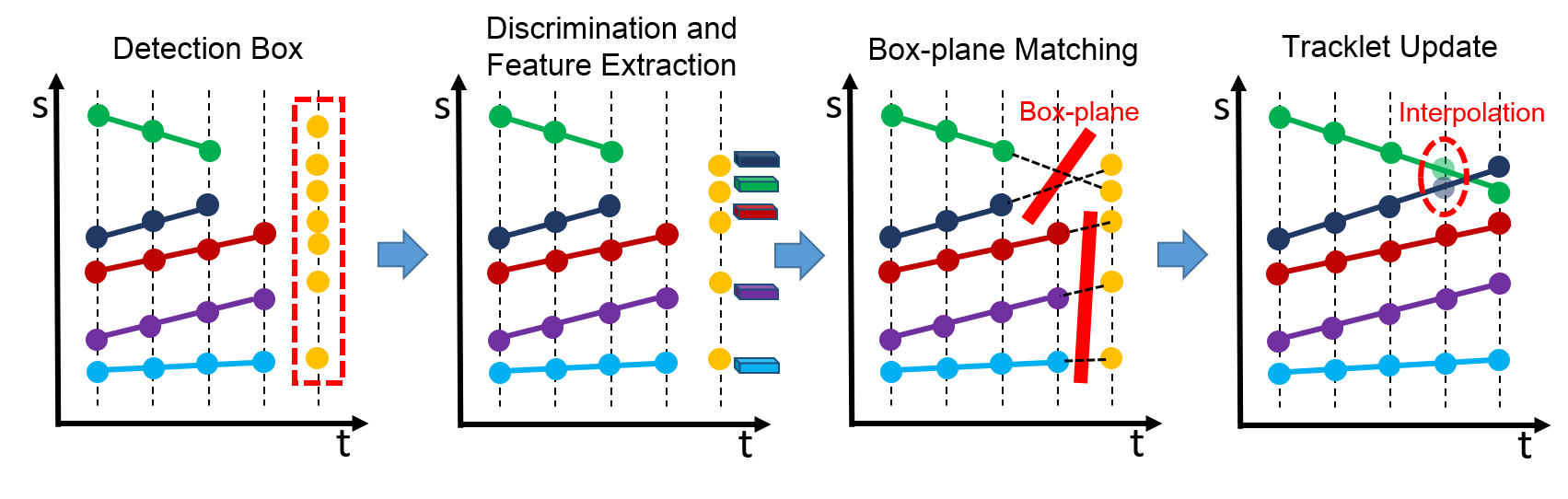
Multiple Object Tracking (MOT) is an important task in computer vision. MOT is still challenging due to the occlusion problem, especially in dense scenes. Following the tracking-by-detection framework, we propose the Box-Plane Matching (BPM) method to improve the MOT performacne in dense scenes. First, we design the Layer-wise Aggregation Discriminative Model (LADM) to filter the noisy detections. Then, to associate remaining detections correctly, we introduce the Global Attention Feature Model (GAFM) to extract appearance feature and use it to calculate the appearance similarity between history tracklets and current detections. Finally, we propose the Box-Plane Matching strategy to achieve data association according to the motion similarity and appearance similarity between tracklets and detections. With the effectiveness of the three modules, our team achieves the 1st place on the Track-1 leaderboard in the ACM MM Grand Challenge HiEve 2020.
翻译:多重物体跟踪(MOT)是计算机视觉中的一项重要任务。 MOT仍然具有挑战性, 特别是在稠密的场景中。 在跟踪逐次检测框架之后, 我们提出“ 框- 平板匹配( BPM) ” 方法, 以改善密密的场景中的MOT性能。 首先, 我们设计了“ 层与层的聚合分解模型 ” ( LADM), 以过滤噪音检测。 然后, 为了正确连接其余的检测, 我们引入了“ 全球关注特征模型 ” ( GAFM), 以提取外观特征, 并使用它来计算历史轨迹和当前检测的相近性。 最后, 我们提出“ 框- 平板匹配策略” 战略, 以根据轨迹和探测之间的运动相似性和外观实现数据关联。 由于三个模块的有效性, 我们的团队在ACM Grand挑战 HiEve 2020 的轨道1 上取得了第一位置 。