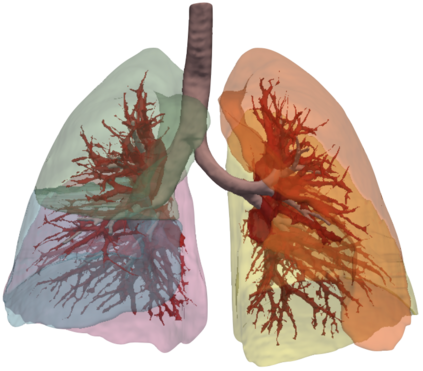
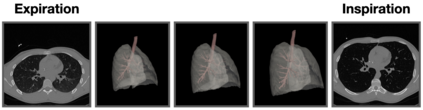
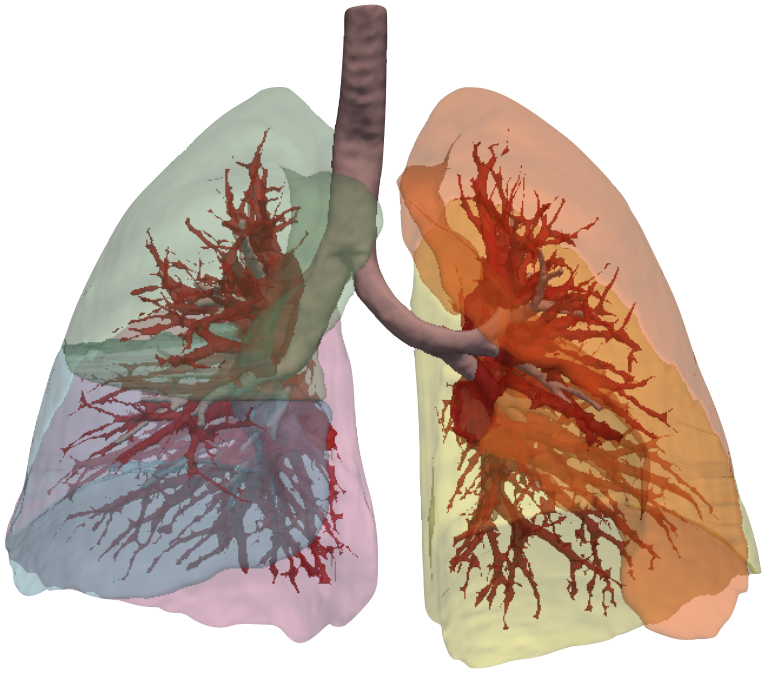
Anatomical models of a medical robot's environment can significantly help guide design and development of a new robotic system. These models can be used for benchmarking motion planning algorithms, evaluating controllers, optimizing mechanical design choices, simulating procedures, and even as resources for data generation. Currently, the time-consuming task of generating these environments is repeatedly performed by individual research groups and rarely shared broadly. This not only leads to redundant efforts, but also makes it challenging to compare systems and algorithms accurately. In this work, we present a collection of clinically-relevant anatomical environments for medical robots operating in the lungs. Since anatomical deformation is a fundamental challenge for medical robots operating in the lungs, we describe a way to model respiratory deformation in these environments using patient-derived data. We share the environments and deformation data publicly by adding them to the Medical Robotics Anatomical Dataset (Med-RAD), our public dataset of anatomical environments for medical robots.
翻译:暂无翻译