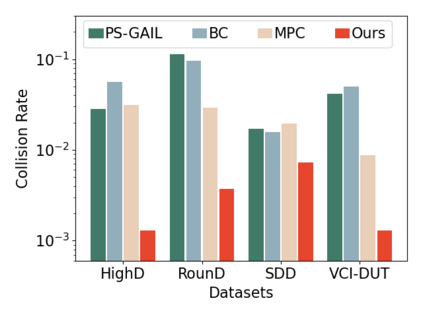
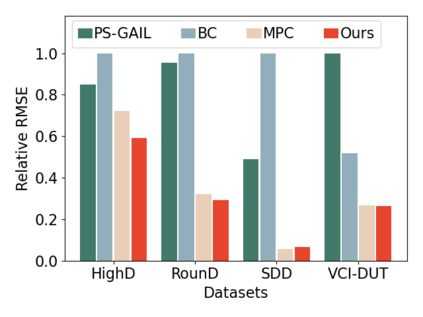
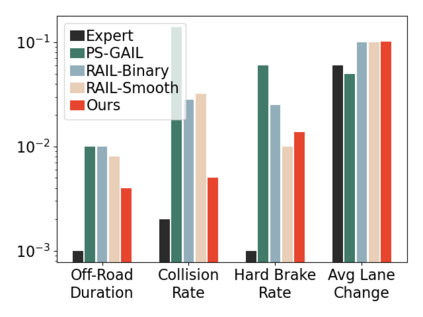
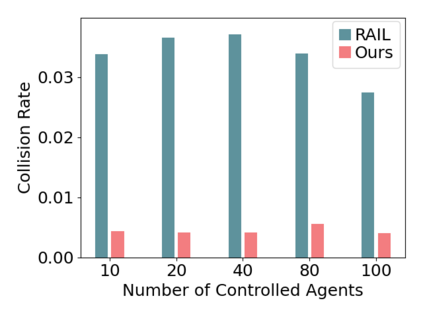
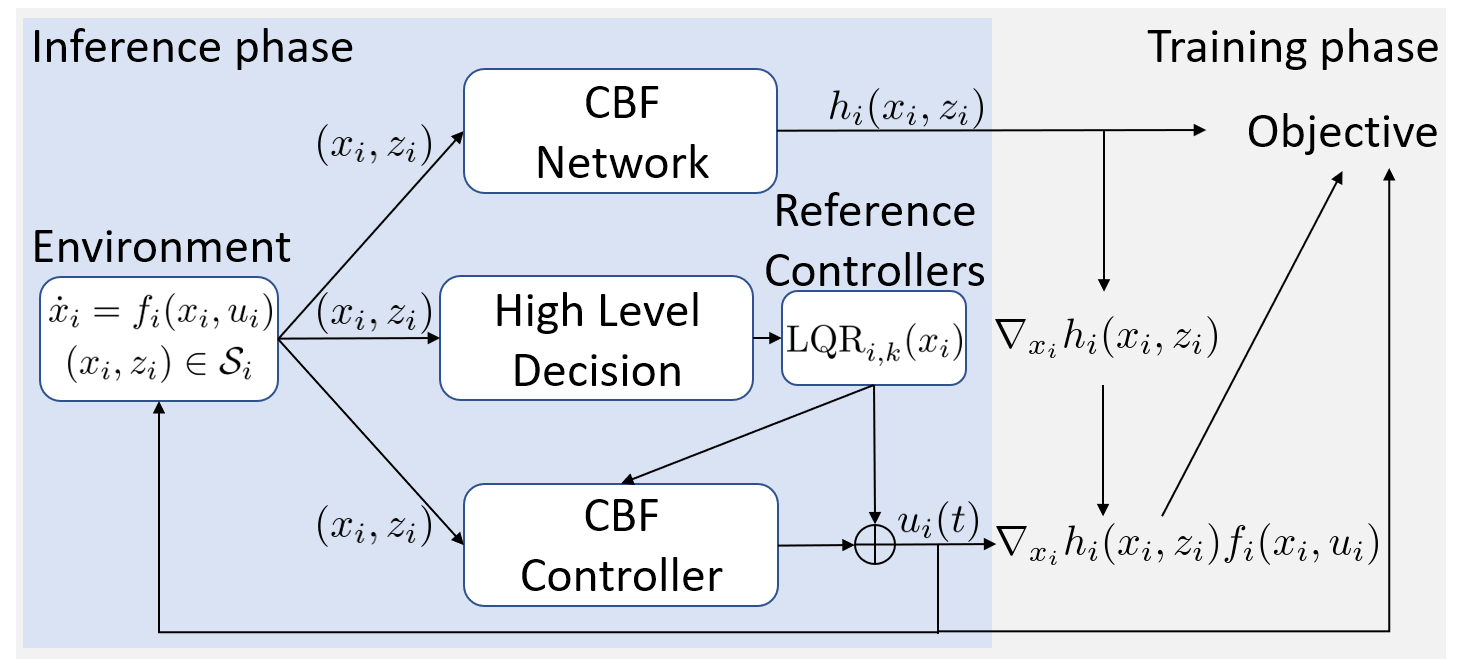
Reactive and safe agent modelings are important for nowadays traffic simulator designs and safe planning applications. In this work, we proposed a reactive agent model which can ensure safety without comprising the original purposes, by learning only high-level decisions from expert data and a low-level decentralized controller guided by the jointly learned decentralized barrier certificates. Empirical results show that our learned road user simulation models can achieve a significant improvement in safety comparing to state-of-the-art imitation learning and pure control-based methods, while being similar to human agents by having smaller errors to the expert data. Moreover, our learned reactive agents are shown to generalize better to unseen traffic conditions, and react better to other road users and therefore can help understand challenging planning problems pragmatically.
翻译:在这项工作中,我们提出了一个反应剂模型,它可以在不包含最初目的的情况下确保安全,其方法是只从专家数据中学习高层决定,在共同学习的分散障碍证书指导下,通过低级别分散控制器学习高级决定。 经验性结果表明,我们学习的公路用户模拟模型可以与最新模拟学习和纯控制方法相比,在安全方面实现显著改善,同时与人类代理物相似,因为与专家数据有较小的差错。 此外,我们学习的反应剂展示了更好地推广到看不见的交通条件,对其他道路使用者作出更好的反应,从而可以帮助理解如何务实地应对规划问题。