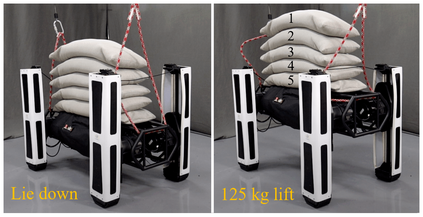
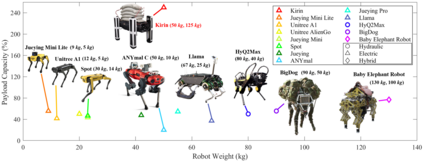
The quadruped robot is a versatile mobile platform with potential ability for high payload carrying. However, most of the existing quadruped robots aim at high maneuverability, highly dynamic and agile locomotion. In spite of this, payload carrying is still an indispensable ability for the quadruped robots. Design of a quadruped robot with high payload capacity is yet deeply explored. In this study, a 50 kg electrically-actuated quadruped robot, Kirin, is presented to leverage the payload carrying capability. Kirin is an characterized with prismatic quasi-direct-drive (QDD) leg. This mechanism greatly augments the payload carrying capability. This study presents several design principles for the payload-carrying-oriented quadruped robots, including the mechanical design, actuator parameters selection, and locomotion control method. The theoretical analysis implies that the lifting task tends to be a bottleneck for the existing robots with the articulated knee joints. By using prismatic QDD leg, the payload carrying capability of Kirin is enhanced greatly. To demonstrate Kirin's payload carrying capability, in preliminary experiment, up to 125 kg payload lifting in static stance and 50 kg payload carrying in dynamic trotting are tested. Whole body compliance with payload carrying is also demonstrated.
翻译:四重机器人是一个多功能的移动平台,具有运载高有效载荷的潜能。然而,大多数现有的四重机器人都以高可操作性、高动态和机动性移动设备为目标。尽管如此,有效载荷仍然是四重机器人不可或缺的能力。目前还深入探索了四重有效载荷能力高的机器人的设计。在本研究中,一个50千克电子起爆四重机器人基林被介绍来利用有效载荷的能力。基林是一个具有半直接驱动腿的特征。这一机制大大增强有效载荷的载荷能力。本研究提出了载荷载荷载荷四重机器人的若干设计原则,包括机械设计、动作参数选择和移动控制方法。理论分析表明,提升任务往往是现有机器人用清晰的膝盖接合的瓶颈。通过使用棱镜QDD腿,基林的载荷能力得到极大的增强。Kirin载荷载荷的载荷载荷能力大大增强载荷载荷载荷载荷运载能力。Kirin的载载荷载载力能力在初步试验中显示,其静态载有效载重为125。