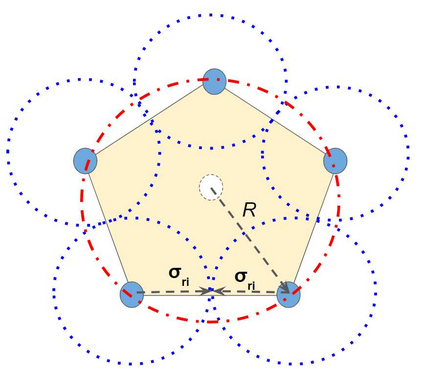
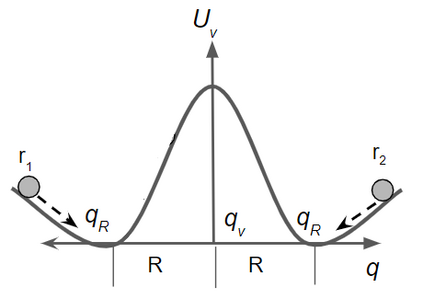
This paper presents a novel quasi-centralized approach for collision-free path planning of multi-robot systems (MRS) in obstacle-ridden environments. A new formation potential fields (FPF) concept is proposed around a virtual agent, located at the center of the formation which ensures self-organization and maintenance of the formation. The path of the virtual agent is centrally planned and the robots at the minima of the FPF are forced to move along with the virtual agent. In the neighborhood of obstacles, individual robots selfishly avoid collisions, thus marginally deviating from the formation. The proposed quasi-centralized approach introduces formation flexibility into the MRS, which enables MRS to effectively navigate in an obstacle-ridden workspace. Methodical analysis of the proposed approach and guidelines for selecting the FPF are presented. Results using a candidate FPF are shown that ensure a pentagonal formation effectively squeezes through a narrow passage avoiding any collisions with the walls.
翻译:本文介绍了一种新型的准集中化办法,用于在障碍重重的环境中对多机器人系统进行无碰撞路径规划,围绕一个虚拟媒介提出了新的形成潜在场域概念,该虚拟媒介位于该结构的中心,确保形成自我组织和维护。虚拟媒介的路径是中央规划的,而FPF微型机器人被迫与虚拟媒介一起移动。在障碍地带,个体机器人自私地避免碰撞,从而略微偏离了形成过程。拟议的准集中化办法将形成灵活性引入了MRS,使MRS能够在充满障碍的工作空间有效航行。对拟议办法和选择FPF的指导方针进行了方法分析。使用候选FPF的结果显示,确保五角形结构通过窄通道有效挤压,避免与墙发生任何碰撞。